
Ein universellen Roboter Board´s mit integrierter Motor-Ansteuerung und Sleep-Modus! ursprünglich im Roboternetz.de entwickelt und nun unter der CC-Lizenz freigegeben!
Dieses Mikrocontroller-Board eignet sich ideal um kleinere bis mittlere Roboter oder Modellfahrzeuge zu steuern. Die notwendigen Motoransteuerung ist bereits direkt auf dem Board verbaut, es können sowohl Getriebemotoren als auch Schrittmotoren angesteuert werden.
Die Board Version 1.2 ist noch etwas stärker gepackt und besitzt einige Bauteile als auch Ports mehr als deren Vorgängerversion. Das Board ist nun auch in der Lage den Ruhestrom im Schrittmotorbetrieb als auch Getriebemodus durch softwaremäßige Ausschaltung der Motorendstufe erheblich zu reduzieren. Zudem gibt es nun einen zusätzlichen Sleep-Modus, welcher Hardware-Erweiterungen (welche dieses Unterstützen) auf einen Stromsparmodus umschalten.
Getrennt davon ist das Board auch in der Lage per Software Sensoren und Aktoren auszuschalten. Durch alle diese Maßnahmen, die getrennt voneinander aktiviert werden können, erhöht die Akkuausdauer erheblich. So kann sich das Board nun z.B. mehrere Stunden schlafen legen und dann per Software erwachen um die Hausarbeit zu übernehmen.
Zudem stehen wie schon gesagt nun auch 5 weiter I/O Ports zur freien Verfügung. Weiterhin sind 3 LED´s hinzugekommen die nun unabhängig vom sogenannten Power-Port angesteuert werden können – diese eignen sich daher optimal als Status-Signale.
Da dieses Board nun alle wesentlichen Wünsche eines Roboter-Bastlers unterstützt – ist keine Revision mehr geplant. Da dieses Projekt jetzt unter der CC-Lizenz lizensiert wurde, kann das Board natürlich nach eigenen wünschen modifiziert werden.
Die Anleitung, Bauteilelisten usw. und sogar die Eagle-Dateien stehen am Ende dieses Beitrages zum Download bereit!
Hier die wichtigsten Features auf einen Blick
- Das Board besitzt alle wichtigen Grundfunktionen die ein autonomer Roboter gewöhnlich benötigt. Sensoren und Motoren können direkt angeschlossen werden – Zusatzboards sind nicht notwendig, jedoch möglich. Denkbar wäre sogar die Kombination mehrerer RNBFRA-Boards – alle huckepack montiert und per I2C oder SPI kommunizierend.
- 2 Getriebemotoren + 1 Schrittmotor gleichzeitig anschließbar (auch größere bis max 2A Phasenstrom) oder nur 2 Schrittmotoren (max. 2A Phasenstrom) ohne Getriebemotoren (theoretisch noch weitere Motoren an den 8 Ausgängen (nennen wir Power-Port) anschließbar.
- Regelbare Schrittmotor Strombegrenzung (L297) , dadurch fast alle gängigen Schrittmotoren anschließbar (auch Schrittmotoren mit kleinen Nennspannungen wie z.B. 3V)
- Voll- und Halbschritt wählbar
- Bei voller Bestückung alles über Jumper oder Steckbrücken jederzeit um konfigurierbar (z.B. von Getriebemotoren auf Schrittmotoren und umgekehrt, ohne löten)
- 10 Servos können direkt angeschlossen werden (alternativ auch andere Dinge an den Servo Anschlüssen)
- 8 Eingangs- oder Ausgangsports über 4 Stiftleisten verfügbar (Sensoren etc.)
- 8 Power-Ausgangsports (max. 500 mA, wahlweise 5V oder 12V) über 4 Stiftleisten verfügbar (für Relais, Motoren oder Logik-Schaltungen)
- 8 Analog-Digitalwandler und weitere Ports über RNB-Stiftleiste verfügbar . Einer wird bereits für Messung der Batteriespannung genutzt
- Drehgeberanschluss für 2 Motoren (über AVR – Interrupt auswertbar)
- 5 LED´s (4 zeigen den Zustand der ersten 4 Power Pin´s an)
- Atmel AVR ATMega 16 on Board (optional Mega 32 oder Mega644)
- Programmierbarer AVR Co-Controller AT90S2313 on Board (entlastet Hauptcontroller) . In der Regel dient dieser zur Servo Steuerung – kann jedoch für andere Aufgaben umprogrammiert werden
- Betriebsspannung 6 bis 24 V (wahlweise getrennte Motorspannung)
- 5V und wahlweise 12 Stabilisierung!
- RNB-Bus (RoboterNetz-Bus zum Anschluss beliebiger Erweiterungen / Controller)
- Kompakter I2C-Bus(mit INT Leitung) zum Anschluss zahlreicher vorhandener Karten
- PC kompatible RS232 (MAX232 on Board) und wahlweise über Haupt- oder Co-Prozessor oder beide nutzbar
- Haupt- und Co-Controller sind über zahlreichen Programmiersprachen programmierbar. Wer nicht in Assembler programmieren möchte für den stehen im Internet kostenlose Open Source Entwicklungstools wie GCC (C-Compiler) oder nutzbare Demos wie Bascom (Basic Compiler) zur Verfügung.
- 6 genormte Bohrlöcher zur Befestigung und “Huckepack Montierung” weiterer Platinen
- Die Kommunikation zwischen Hauptcontroller und Co-Controller erfolgt über den I2C Bus. Über einen Jumper lässt sich ganz einfach zusätzlich auch eine RS232 und eine Interrupt-Verbindung zwischen Controller und Co-Controller einstellen.
- Alle Stecker sind nach der Definition vom Roboternetz ausgelegt
- Durch genaue Festlegung welcher Port für welche Funktion zuständig ist, lässt sich erstmals Software mit allen Boards austauschen die sich an die vereinbarten Definitionen halten
- Das Board verfügt über zwei Standard ISP-Anschlüsse sowohl für Hauptcontroller als auch CoController.
- Alle Bauteile sind über gängige Elektronikanbieter erhältlich. Bezugsquellen-Links findet man auf der Projektseite: https://www.mikrocontroller-elektronik.de/
- Eine professionelle Platine könnte man sich über die Eagle-Dateien, die auf der Projektseite zum Download bereitstehen, selber anfertigen lassen. Links zu entsprechenden Platinen-herstellern findet man auch unter https://www.mikrocontroller-elektronik.de/
- Neue Stromsparfunktionen – Ausgangsspannung auf Sensoranschlüssen und Aktoren kann per Software abgeschaltet werden
- Motorendstufe kann vollständig ausgeschaltet werden
- Sleep-Modus (Zusatzboards können in Schlafmodus (Stromsparmodus) versetzt werden – dies muss jedoch vom Zusatzboard unterstützt werden)
- Ab Version 1.2 noch weitere 3 Status-LED´s und 5 frei I/O Zusatzports
- Und das beste: Trotz aller Features ist dieses Board selbst bei voller Bestückung sehr preiswert realisierbar
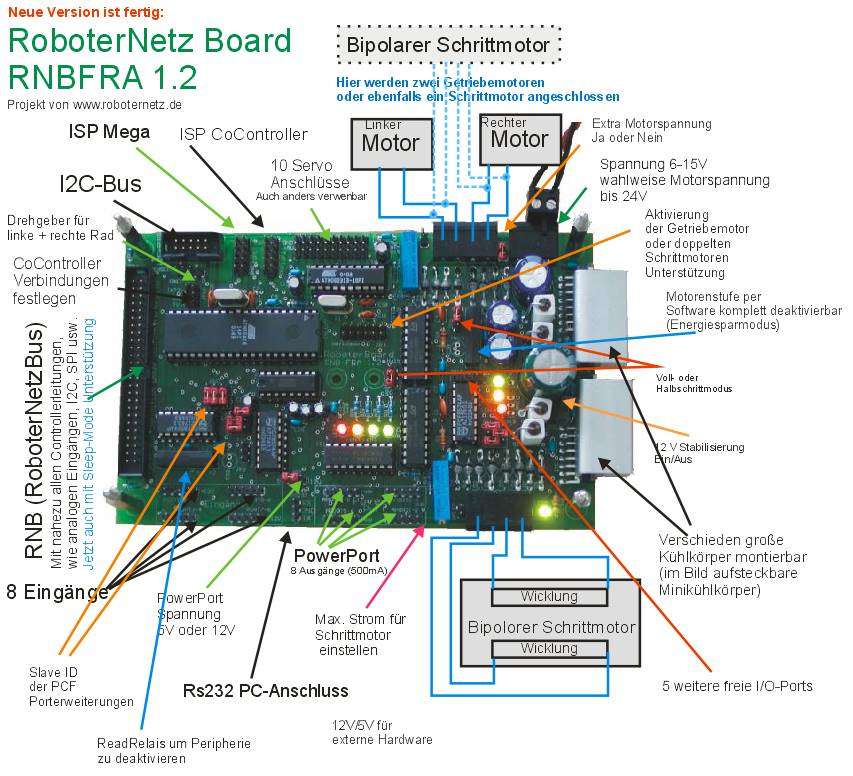
Übersicht der Funktionselemente / Features
Schaltplan
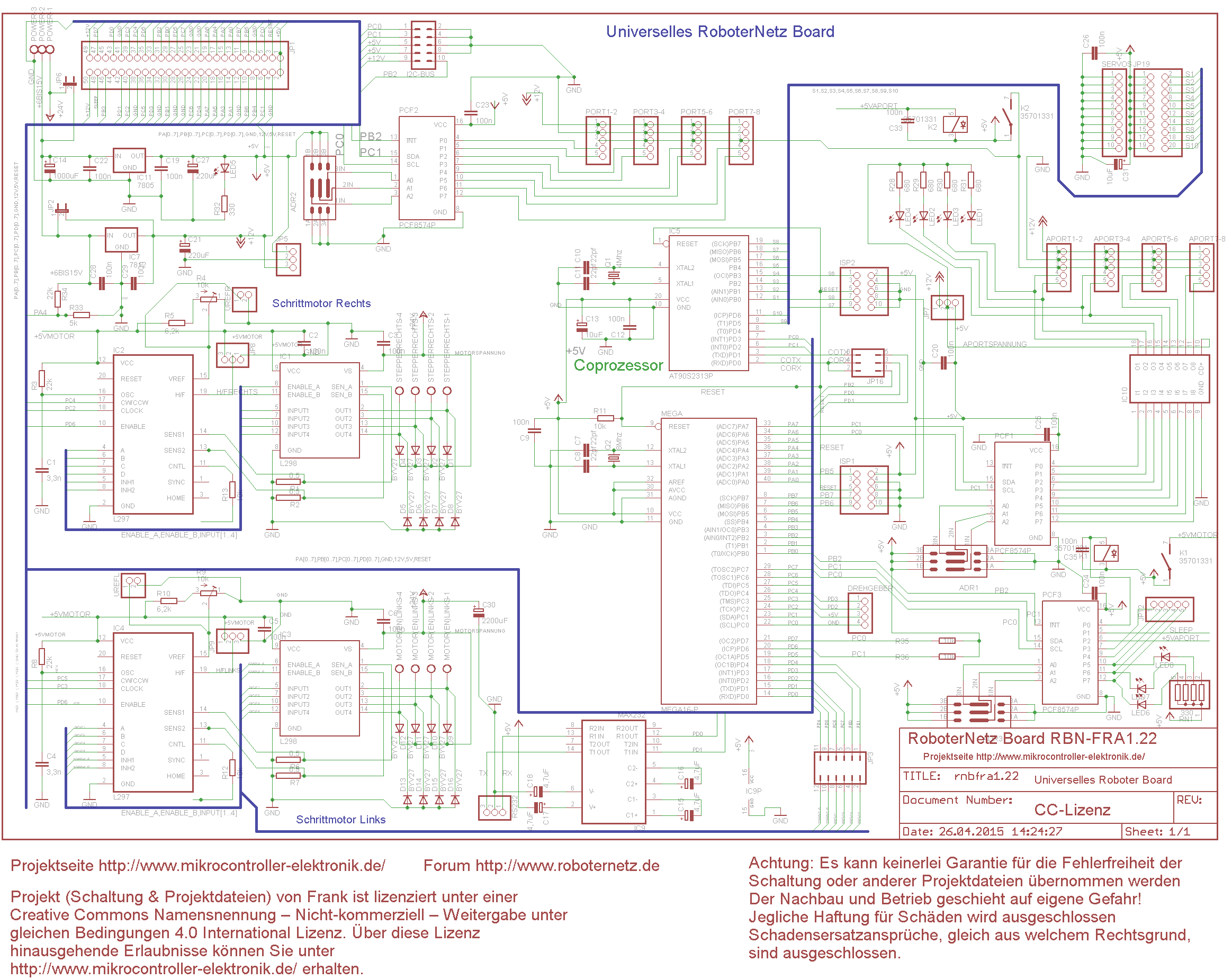
Schaltbild Roboterboard RNBFRA
Bestückungsplan
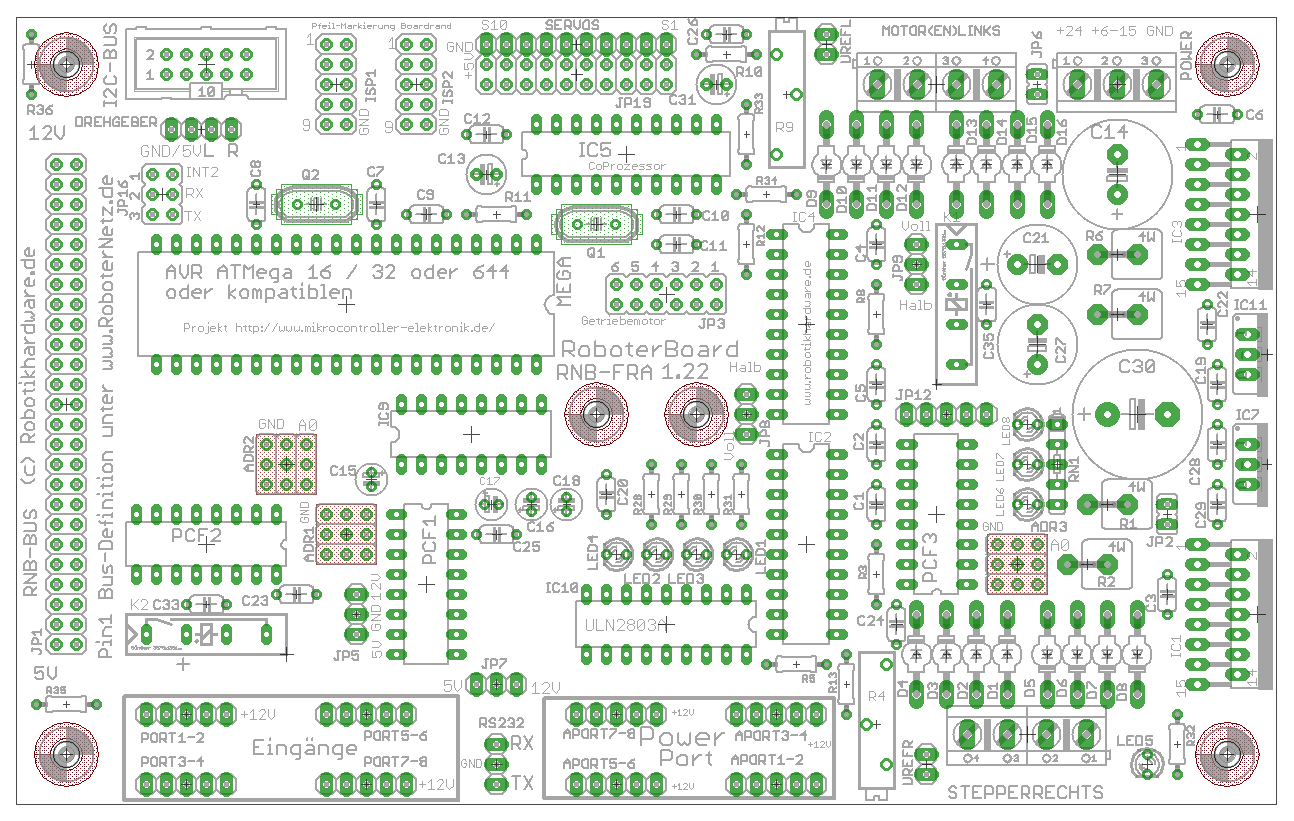
Bestückungsplan Roboterboard RNBFRA
Bauteile Bestückungsliste / Bestellliste
Anzahl Bezeichnung auf Platine Wert / Maße Bezugsquelle/Best.Nr. ---------------------------------------------------------------------------------------- 4 R1,R2,R6,R7 0,5 Ohm 4-5 Watt (Raster 27mm) Bezugsquelle* Reichelt 1 C14 1000uF/35V (R=5mm, D=14mm) Bezugsquelle* Reichelt 16 C2,C3,C5,C6,C9,C12,C19, C20,C22,C23,C25,C26,C28, C29,C33,C35 100n (R=5mm L=6mm,B=3mm) Bezugsquelle* Reichelt 5 R11,R12,R13, R35,R36 10K (R=7,5mm L=6mm,B=2,5mm) Bezugsquelle* Conrad 2 R4,R9 10k Spindeltrimmer(L=14mm,B=4,5mm) Bezugsquelle* Reichelt 2 C13,C31 10uF/63V (R=2,5mm, D=4mm) Bezugsquelle* Reichelt 2 C27,C21 220 uF/35V (R=5mm, D=10mm) Bezugsquelle* Reichelt 1 C30 2200 uF/35V (R=7,5mm, D=16mm) Bezugsquelle* Reichelt 3 R3,R8,R34 22k (R=7,5mm L=6mm,B=2,5mm) Bezugsquelle* Conrad 4 C7,C8,C10,C11 22pf (R=5mm L=6mm,B=3mm) Bezugsquelle* Reichelt 1 R32 330 (R=7,5mm L=6mm,B=2,5mm) Bezugsquelle* Conrad 2 C1,C4 3,3n (R=5mm L=6mm,B=3mm) Bezugsquelle* Reichelt 4 C15,C16,C17,C18 1 uF oder 4,7uF(R=2,5mm, D=4mm) Bezugsquelle* Reichelt 9 APort1-2, APort2-4, APort5-6, APort7-8, Port1-2, Port2-4, Port5-6, Port7-8,JP12 5 pol Stiftleiste 1x5 gerade Bezugsquelle+ Reichelt 1 R33 5,1k (R=7,5mm L=6mm,B=2,5mm) Bezugsquelle* Conrad 2 R5,R10 6,2k (R=7,5mm L=6mm,B=2,5mm) Bezugsquelle* Conrad 4 R28,R29,R30,R31 680 (R=7,5mm L=6mm,B=2,5mm) Bezugsquelle* Conrad 1 IC11 78S05 (2A) oder LM2940 CT5 (1A) Bezugsquelle* Reichelt 1 IC7 78S12 (2A) oder LM2940 CT12 (1A)Bezugsquelle* Reichelt 1 MEGA ATMEGA 16/32 oder 644 DIP Bezugsquelle* Reichelt 1 IC5 Atmel AT90S2313 /ATTINY23132 Bezugsquelle* Reichelt 16 D1,D2,D3,D4,D5,D6,D7,D8, D9,D10,D11,D12,D13,D14, D15,D16 BYV27/200 Bezugsquelle* Reichelt 4 JP2,JP6,UREFR,UREFL Jumper Stiftleiste 1x2 Bezugsquelle* Reichelt 8 JP7,JP8,JP9,JP5,RS232, ADR1,ADR2,ADR3 Jumper Stiftleiste 1x3 Bezugsquelle* Reichelt 4 JP16,ADR1,ADR2,ADR3 Jumper Stiftleiste 2x3 Bezugsquelle* Reichelt 1 JP3 Jumper Stiftleiste 2x6 Bezugsquelle* Reichelt 2 IC2,IC4 L297 Bezugsquelle* Reichelt 2 IC1,IC3 L298 Bezugsquelle* Reichelt 4 LED1,LED3,LED5,LED8 Leuchtdiode 3mm grün Bezugsquelle* Reichelt 2 LED2,LED7 Leuchtdiode 3mm gelb Bezugsquelle* Reichelt 2 LED4,LED6 Leuchtdiode 3mm rot Bezugsquelle* Reichelt 1 IC9 MAX232 CPE Bezugsquelle* Reichelt 3 PCF1,PCF2,PCF3 PCF8574 AP Bezugsquelle* Reichelt 1 Q1 Quarz 4 Mhz Bezugsquelle* Reichelt 1 Q2 Quarz 8 Mhz Bezugsquelle* Reichelt 1 Power Schraubklemmen 3polig (R=5,12) Bezugsquelle* Reichelt 2 MOTOR(EN)LINKS, Stepperrechts Schraubklemmen 4er (R=5,12)Bezugsquelle* Reichelt 1 SERVOS Stiftleiste 1x10 gerade Bezugsquelle* Conrad 1 Drehgeber Stiftleiste 1x4 gerade Bezugsquelle* Reichelt 1 JP19 Stiftleiste 2 x 10 gerade Bezugsquelle* Reichelt 1 JP1 Stiftleiste 2x25 Bezugsquelle* Reichelt 2 ISP1,ISP2 Stiftleiste 2x5 gerade Bezugsquelle* Reichelt 1 I2C-Bus Wannenbuchse 2x5 gerade Bezugsquelle* Reichelt 1 IC10 ULN2803A Bezugsquelle* Reichelt 19 Kurzschlussstecker JUMPER Bezugsquelle* Reichelt 1 Kühlkörper Kühlkörper(B=95mm,H 20 bis 30 mm) Bezugsquelle* Reichelt 3 20 pol Fassung für IC2,IC4,IC5 20 pol Fassung Bezugsquelle* Reichelt 4 16 pol Fassung für IC9,PCF1,PCF2,PCF3 16 pol Fassung Bezugsquelle* Reichelt 1 18 pol Fassung für IC10 18 pol Fassung für ULN2803A Bezugsquelle* Reichelt 1 40 pol Fassung für U$1 40 pol Fassung für ATMEGA 16 Bezugsquelle* Reichelt 1 RN1 Widerstandsnetzwerk ca. 600 Ohm Bezugsquelle* Reichelt 2 Reed Relais SIL 5V SIL Relais Bezugsquelle* Reichelt 4 Abstandsbolzen min. 35mm Um später Huckepack Erweiterungen zu montieren 4 Abstandsbolzen min. 10 mm Zum montieren des Boards Bezugsquelle* Reichelt Angaben ohne Gewähr
Aufbauanleitung
Da die gesamte Aufbauanleitung den Rahmen dieses Beitrags sprengen würde, habe wir uns hier im Beitrag nur auf Schaltplan, Bauteileliste und einige andere Punkte beschränkt. Die komplette Aufbauanleitung mit weiteren Bildern haben wir in ein PDF-Dokument gepackt! Am Ende dieses Beitrages könnt ihr dieses unter Download herunterladen!
In jedem Fall ist ein Lötkolben von 20 bis 30 Watt mit spitzer Lötkolbenspitze empfehlenswert. Stärkere Lötkolben können die Bauteile beschädigen. Gelötet wird ausschließlich auf der Unterseite der Platine (die Seite die nicht bedruckt ist).
Die Bauteile werden ausschließlich von der bedruckten Seite in das Board gesteckt. Hier ist in jedem Fall eine kleine Spitzzange und Seitenschneider notwendig. Die meisten Bauteile wie Kondensatoren, Schaltkreise etc. passen genau in die Bohrungen. Einige andere Bauteile wie Widerstände und Dioden müssen stets mit der Spitzzange gebogen werden. Da das Board wegen der zahlreichen Features recht kompakt bestückt werden musste, sind einige Bauteile wie die Widerstände sehr eng am Widerstandskörper abzubiegen (je nachdem über welchen Hersteller diese Teile bezogen wurden). Einsteiger sollten hier unbedingt darauf achten das dabei das Bauelement nicht zu stark belastet und so beschädigt wird.
Je nach Erfahrung kann der Aufbau schon einige Stunden in Anspruch nehmen wenn man sehr sorgfältig vorgeht.
Für den Aufbau sollte man sich möglichst dieses komplette PDF-Dokument ausdrucken. Sehr wichtig ist der Bestückungsplan und die Stückliste. Auf der Platine sind alle Bauteilbezeichnungen aufgedruckt, ein Blick in die Stückliste beschreibt das Bauteil genauer. In der Regel ist die Beschriftung der Platinenseite in Verbindung mit der Stückliste, zum korrekten Aufbau ausreichend. Es gibt jedoch einige Stellen auf der Platine wo der Bestückungsdruck aufgrund von vielen Bohrlöchern und Durchkontaktierungen nicht eindeutig ist. Daher sollte man im Zweifel immer einmal einen Blick in den ausgedruckten Bestückungsplan werfen. Dort ist genau erkennbar wo welches Bauteil wie herum gehört.
Besonders acht sollte man bei den Elkos C13, C14, C15, C16, C17, C18, C21, C27, C30,C31 geben, diese müssen richtig herum eingelötet werden, die Polarität ist auf der Platine, im Bestückungsplan und auf dem Bauteil erkennbar.
Wo fängt man an?
Dies ist im Grunde egal. Zuerst sollte man jedoch überdenken was man bestücken möchte. Am besten aber auch am teuersten ist es natürlich wenn man alles bestückt. Möchte man aber in keinem Fall Schrittmotoren benutzen, dann kann man einen Teil der Bauelemente weglassen und dadurch Kosten und Strom sparen. Welcher Teil in diesem Fall weggelassen werden kann, ist in der letzten Spalte der Bestückungsliste erkennbar. Ich persönlich empfehle jedoch möglichst alles zu bestücken, denn dadurch erhält man ein universelles Roboterboard mit dem man fast alles machen kann.
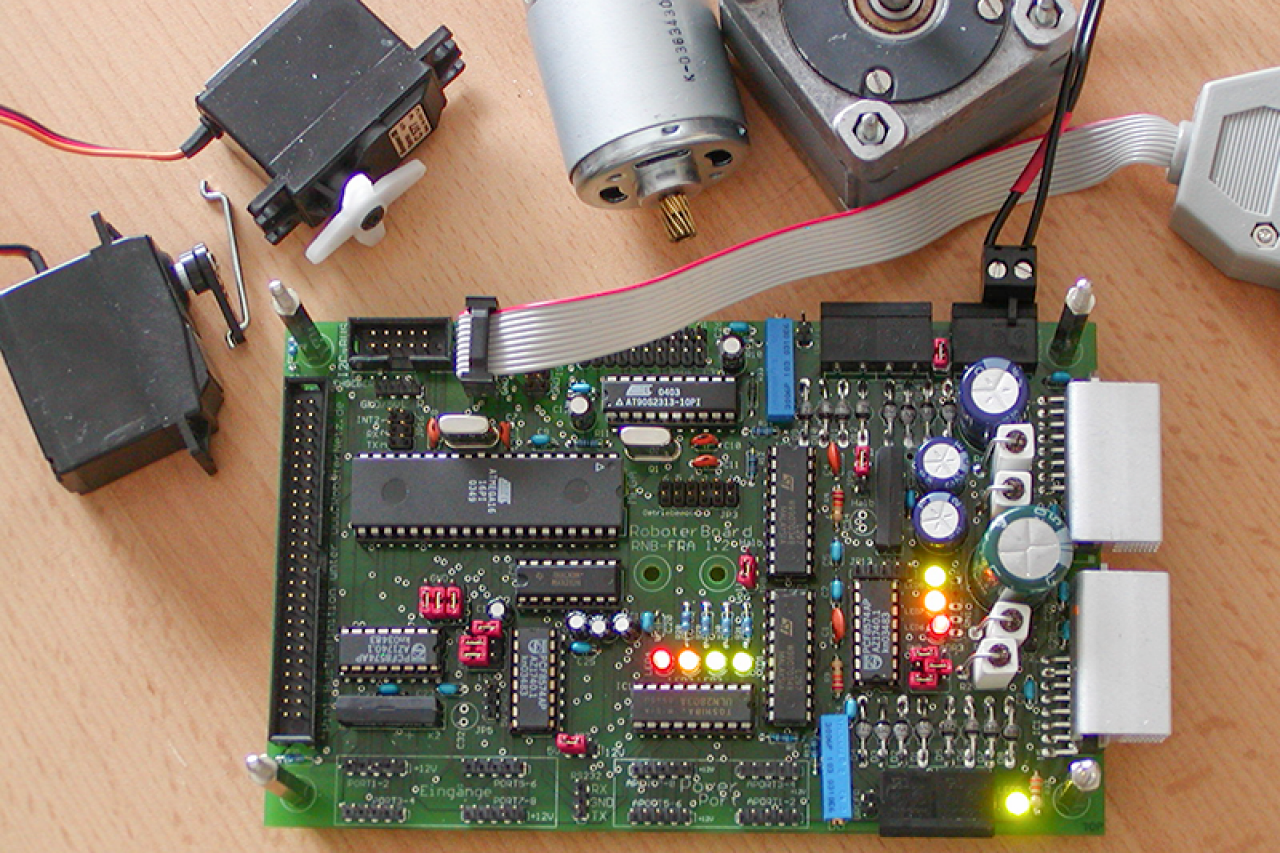
Hier nun ein paar Bilder wie der Aufbau verlaufen könnte:
1. Getriebemotortreiber L298 und 5V Spannungsregler einsetzen. Hier sollte man darauf achten das man die Bauteile so einsetzt, das alles Bauteile später gut an einem Kühlkörper anliegen und die Bohrlöcher zum befestigen eines Kühlkörpers auf gleicher Höhe liegen.
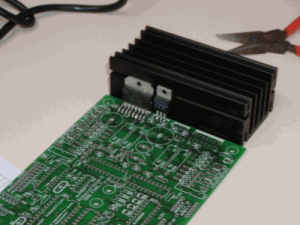
Aus Platzgründen und um eine Huckepack-Montierung nicht zu behindern, wurde der Kühlkörper nämlich außerhalb der Platine plaziert. Am besten nimmt man beim Einlöten dieser Bauteile einen Kühlkörper zur Hilfe (siehe vorheriges Bild).
Oder wenn man einen flachen Kühlkörper aus Platzmangel bevorzugt, dann könnte es wie im nächsten Bild aussehen. Hier muß man später allerdings manuell die Löcher zur Befestigung der Bauteile am Kühlkörper selbst bohren.
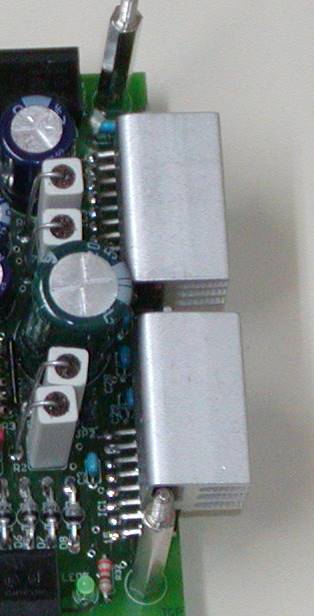
Verschiedene Kühlkörper sind denkbar
Die Größe des Kühlkörpers ist abhängig von dem Strombedarf der Motoren und eventuellen Zusatzboards. Für den Testbetrieb mit kleinen Motoren die weniger als 0,6A benötigen kann man das Board auch schon mal eine Weile ohne Kühlkörper nutzen (insbesondere wenn die Eingangsspannung nicht höher als 9V ist). Für den Dauerbetrieb sollte man jedoch zumindest ein Blech oder kleineren Kühlkörper montieren und alle hinteren Schaltkreise verschrauben. Wenn man das Board in einem Alu-Gehäuse montiert, kann man die hinteren Bauteile auch einfach mit der Gehäusewand verschrauben.
Wichtig ist nur, das die Bauteile nicht so stark mechanisch belastet werden, also eventuell den Kühlkörper mit Abstandsbolzen abstützen.
Will man später eventuell 2 Schrittmotoren ansteuern, dann sollte man gleich alle beiden L298 einlöten. Andernfalls würde einer reichen (siehe letztes Bild).
Danach sollte man mit den umliegenden Bauteilen beginnen.
Wichtig: Bauteile die auf der Unterseite eine leitende Fläche besitzen wie einige stehende Kondensatoren oder Quarze, sollten aus Sicherheitsgründen so eingelötet werden das noch etwa 1-2 mm Platz zwischen Bauteil und Platine besteht. Zwar sind die oberen Leiterbahnen durch Lötstoplack isorliert, abe rich empfehle hier immer auf Nummer sicher zu gehen!
Ansonsten ist eigentlich nur darauf zu achten das man sich nicht selbst den Zugang zu kleineren Bauelementen erschwert.

Mann kann danach Region für Region weiter mit Bauteilen bestücken. Sinnvoll ist es auch immer eine Gruppe von Bauelementen einzubauen. Zum Beispiel erst mal alle Widerstände eines Wertes, dann nächster Wert und dann alle Kondensatoren eines Wertes usw.
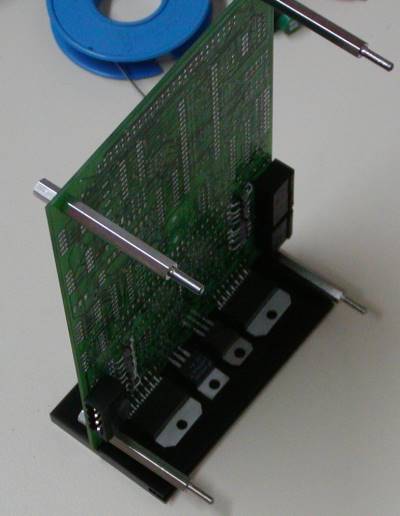
Tip: Um das bestücken zu vereinfachen kann man sich mit Abstandsbolzen behelfen. Wenn man diese schon vor der Bestückung oben und unten verschraubt, dann kann man die Platine sehr schön auf jede Seite stellen und wesentlich besser löten. Profis haben alternativ vielleicht auch einen Platinenhalter!
Es geht langsam aber sicher voran 😉

und am Ende sieht es etwa so aus …
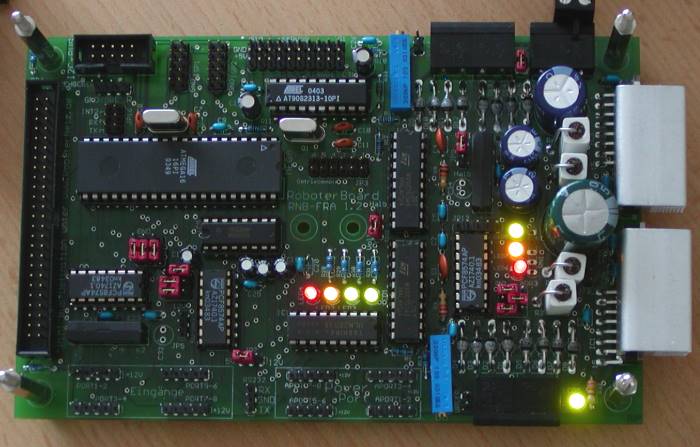
Hat man die Schaltung soweit wie auf dem oberen Bild, dann hat man es endlich geschafft!!!!
Das Board ist komplett aufgebaut und alle Jumper stecken korrekt (hier im Bild Schrittmotor-Betriebsart)
Achtung: Bevor Spannung angelegt wird sollte man nochmal genau alle Jumper (Steckbrücken) genau anschauen und überprüfen. Die genaue Bedeutung steht in dieser Anleitung weiter vorn. Eine falsche Steckbrücke kann unter ungünstigen Umständen Schaltkreise beschädigen!
Erst wenn alle Jumper stimmen und geprüft wurde das keine Kurzschlüsse beim Löten verursacht wurden kann man Spannung an den beiden Schraubklemen [+6-15] und [GND] anlegen (nicht verpolen).
Natürlich tut sich dann noch nix, wie auch, der Controller ist ja noch nicht programmiert Er könnte jetzt aber mit einem kleinen Programmierdongle an die Druckerschnittstelle des PC oder an einen USB-Port angeschlossen und programmiert werden. Für erste Test´s empfehle ich den Basic-Compiler Bascom da dafür schon einige Testprogramme am Ende des Artikel bereit stehen!
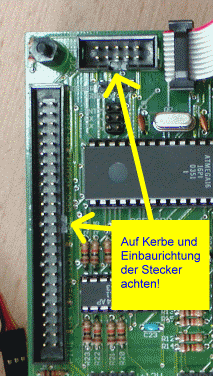
Achten sollte man auch darauf das der Programmer immer richtig herum aufgesteckt wird.
Wie gesagt, die ausführliche Dokumentation findet ihr in dem PDF-Dokument zum herunterladen!
Roboterboard RNBFRA
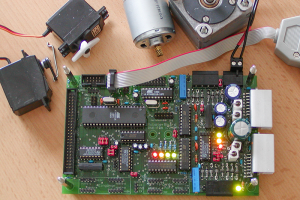
Ein paar Beispiele von Robotern, die mit dem Board aufgebaut wurden

Downloads
Ausführliche Projektbeschreibung (PDF)
Eagle-Dateien (ZIP)
Bascom Beispiel- und Testprogramme
Leiterplatte zum Projekt bestellen
Neu! Die Leiterplatte für dieses Projekt ist direkt über den Shop PlatinenCenter erhältlich. Da die Platinen dort vorgefertigt werden, sind diese sehr preiswert lieferbar.
Individuelle Leiterplatten
Möchtest du keine vorgefertigte Leiterplatte, weil Du vielleicht vorher Änderungen an dem Layout vornehmen möchtest, dann empfehlen ich die Anbieter auf unserer Leiterplatten-Service Seite.
Das Leiterplattenangebot ist ein Service Angebot der jeweiligen Anbieter. Bei Fragen bezüglich Lieferung und Preis bitte dort nachfragen!
Links zum Thema
- Forum für Diskussionen
- Bascom
- Weiteres Controllerboard RN-AVR-Universal
- Gute geeignete ISP Programmer im Test
Geeignete Programmer für die Programmierung



Letzte Aktualisierung am 30.03.2025 / * Affiliate Links
Weitere Hinweise
Vor dem Aufbau bitte nachfolgende Hinweise lesen:Das Projekt unterliegt einer CC-Lizenz - Lizenzhinweis (zum Aufklappen anklicken)
Falls Dir der Beitrag gefallen oder geholfen hat kannst Du dem Autor aber gerne durch eine kleine Spende Danke sagen!


Sollten alle Artikel von Reichelt enthalten sein. Bitte aber noch einmal prüfen:
Warenkorb für RNBFRA*
Wunderbar, danke für Warenkorb Zusammenstellung. Erleichtert Bestellung sicherlich.
Ich wollte das RNFRA Board bestellen, die Eagle Daten wurden zu Gerberdaten umgewandelt. Könnte bitte jemand diese Daten überprüfen? Ich habe leider nicht die Möglichkeit die Daten zu öffnen.
Link zu den Gerberfiles: https://drive.google.com/open?id=0B0c2a2vPbTXjTWtka0g0bzRxRmc
Viele Leiterplatten Hersteller nehmen auch die Eagle Datei direkt an, dann kannst du dir Umwandlung ersparen! Ob deine Gerber Datei korrekt ist, fragst du am besten den Leiterplatten Hersteller, ich kann dir das auch nicht sagen!
Wer weiß wo gibt es einen Komplettbausatz und ca. kostet dieser
Ein Bausatz wird eigentlich nicht mehr angeboten! Aber die Bauteile werden ja alle mit Bezugsquelle aufgelistet.
Wenn du unbedingt Bausatz brauchst, dann kannst du per Kontaktformular anfragen ob noch Restbestand lieferbar ist (einige Platinen sind z.B. noch erhältlich).
Ich danke für den interessanten Artikel. Schade dass der Bausatz nicht mehr angeboten wird.
Beste Grüße,
Lars
Hallo,
wir haben uns die Platinen RNBRFA 1.22 entsprechend der Eagle Datei anfertigen lassen und entsprechend bestückt. Leider bekommen wir das Board nicht ans laufen. Das Beispielprogramm mit BASCOM scheitert bereits am Lauflicht.
LED 6-8 (rot, gelb und grün) gehen an, auch die grüne Lampe vom Board leuchtet.
Wir haben alle Lötpunkte noch einmal sehr genau untersucht und können hier keinen Fehler entdecken. Auch entsprechende Bauteile sind definitiv richtig herum eingelötet. Die Adressen der PCF 8574 AN haben wir entsprechend gesetzt und auch noch mal mit dem Datensheet überprüft.
Das Programm bekommen wir ohne Fehler hochgeladen, der Atmega32 scheint zu funktionieren.
Wer hat eine Idee, wie wir weiter einen Fehler eingrenzen können.
Eine Frage vorab: Der Kondensator C24 wird in der Bauteilbeschreibung nicht aufgeführt, ist aber auf dem Board gekennzeichnet und auf dem Bild zu erkennen. Da er farbig und von der Form genau so aussieht wie die anderen 100nF auf dem Bild, haben wir erst mal geschlossen, dass es sich hier auch um einen 100nF handeln muss. Hat es einen Grund, dass er bei den Bauteilen nicht erscheint, aber warum ist er auf dem Board Bild zu sehen? Wir haben es erst mal mit dem Kondensator probiert, dann auch mal wieder ausgelötet, kein Effekt.
Wir sind nun ratlos 🙁
Vielen lieben Dank für jeglichen Lösungsansatz,
Klaus und Nils
Offenbar gibt es inzwischen einige IC´s vom Typ PCF8574 die nicht genügend Strom zum Ansteuern des nachfolgenden Treiberbausteins liefern. Verschiedene Hersteller listen hier unterschiedliche Angaben in den Datenblättern auf. Beim Bezug des PCF8574 darauf achten das genügend Strom geliefert werden kann. Notfalls kann man die Ausgänge auch mit einem Pullup-Widerstand beschalten. Tipps dazu auch hier.