
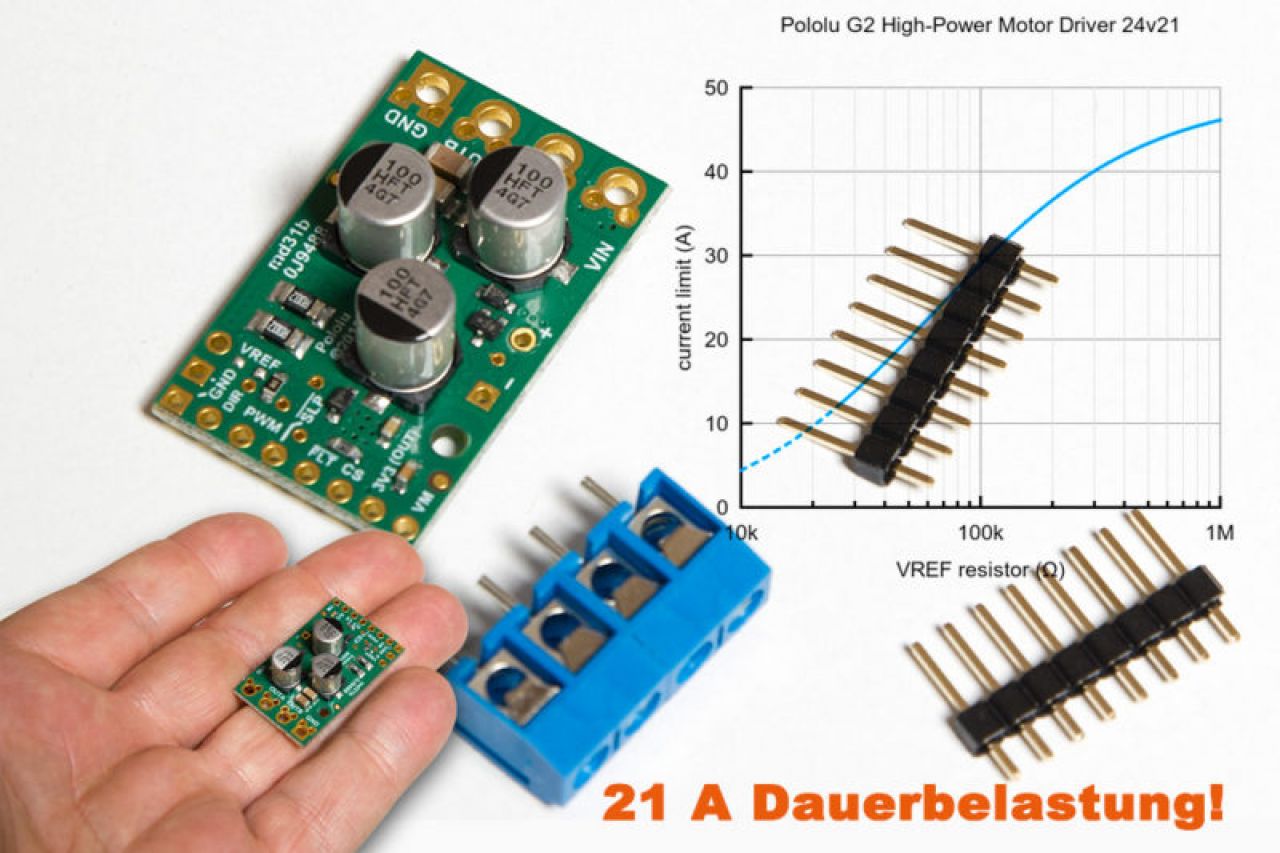
Die amerikanische Firma Pololu hat einen neuen interessanten Motortreiber vorgestellt, welcher sich ideal auch für die Ansteuerung sehr starker Gleichstrommotoren mittels Mikrocontroller eignet. Trotz des Mini-Formates verträgt dieser Motortreiber bis zu 21 A Dauerbelastung und das sogar ohne Kühlkörper.
Der neue Motortreiber: Pololu G2 High-Power Motor Driver 24v21
Weiterer Vorzug dieses neuen Motortreibers ist, dass dieser gegen Verpolung, Kurzschluss, Unterspannung und Überlastung geschützt ist. Er erlaubt auch die Begrenzung des Ausgangsstromes, was ein großer Vorteil gegenüber vielen Billig-Produkten darstellt. Zudem besitzt der Motortreiber einen großen Spannungsbereich von ca. 6,5 bis 40V. Er kann also beispielsweise ideal für 6V, 12V und 24V Motoren eingesetzt werden. Wenn man ihn an einem aufladbaren Akku betreibt, so empfiehlt der Hersteller dass man die Batteriespannung von 28V nicht überschreitet, da bei solchen Akkus die Spitzenspannung nach dem Laden ja durchaus wesentlich höher sein kann.
Der Motortreiber kann wahlweise an Mikrocontrollern mit Spannungen von 1.8 V, 3.3 V oder 5V betrieben werden, beispielsweise wären damit alle Arduino-Boards, aber auch Boards wie RN-AVR-Universal, RN-Mikrofunk oder RN-Control, geeignet.
Die Entwickler haben auch an ein Ausgangssignal gedacht, mit dessen Hilfe sich der aktuelle Motorstrom über einen einfachen analogen Port messen lässt. Pro Ampere wird eine Spannung von 0,02V an einem Signalpin bereitgestellt. Man muss also nur diese Spannung messen und durch 0,02V teilen um den aktuellen Motorstrom in Ampere zu erhalten.
Der Motortreiber wird fertig aufgebaut geliefert, lediglich die mitgelieferten Stiftleiste und Schraubklemmen können bei Bedarf eingelötet werden. Der Pololu G2 Motortreiber ist bereits mit mehreren SMD Elkos zu Stabilisierung der Motorspannung bestückt. Empfohlen wird jedoch noch ein zusätzlicher Elko mit mehreren hundert Mikrofarad, ein Anschluss dafür ist bereits auf der Platine vorgesehen.
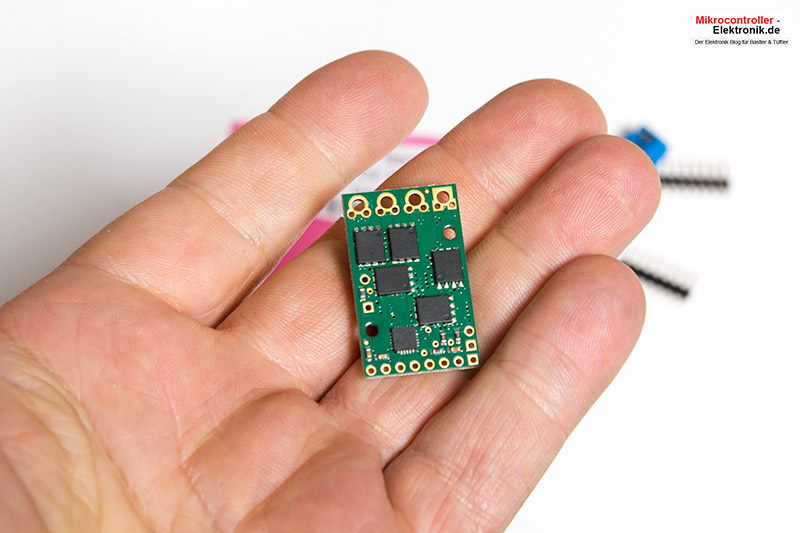
So winzig und dennoch so leistungsstark! Hier im Bild von unten betrachtet.
Technische Daten des Motortreibers Pololu G2 High-Power Motor Driver 24v21
- Arbeitsspannung: 6,5V
- Arbeitsspannung: 40V (empfohlen wird maximal 34V)
- Dauerbelastung des Ausgangs: 21 A (Typische bei 100% Dutly Cycle und Raumtemperatur)
- Liefert Signale für Strommessung per analogen Port: 0,02V pro Ampere
- Maximale PWM Frequenz: 100 kHz
- Minimale Logic Spannung 1,8V
- Maximale Logic Spannung 5,5V
- Sehr kompakt (3,3cm x 2 cm), Gewicht 5g
Besondere Features des Pololu G2 Motortreibers
- Geschützt gegen Verpolung
- Sehr kompakt (3,3cm x 2 cm), Gewicht 5g
- Benötigt keinen Kühlkörper
- Einstellbare Strombegrenzung über einen Widerstand
- Kurzschlussschutz mit automatischer Abschaltung
- Unterspannungsschutz mit automatischer Abschaltung
- Liefert Signale für Strommessung
- Liefert Signal für Fehleranzeige
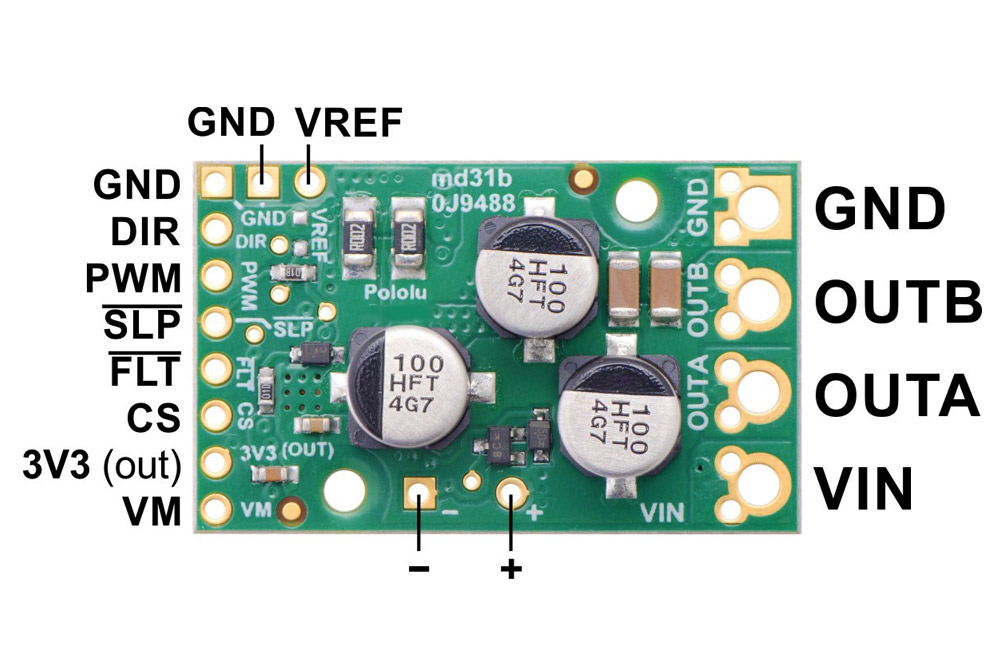
Pololu G2 High-Power Motor Driver 24v21 Pinbelegung
Die Funktion der Pins werden durch Anklicken erläutert!
VIN
VIN
Motorspannung zwischen 6,5 und maximal 40V (empfohlen max. 34V)
VM
VM
Ausgangspin der Motorspannung nach dem integriertem Verpolungsschutz. Hier kann die Spannung für andere Komponenten abgezapft werden. Gewöhnlich wird der Pin nicht benötigt!
+/-
+/-
Anschluss für einen zusätzlichen Motorkondensator (ELKO)
3V3(out)
3V3(out)
Dieser Ausgang liefert ein paar mA des eingebauten 3,3V Spannungsreglers. Er kann für die Versorgung ganz kleiner Komponenten verwendet werden. Er darf jedoch nicht überlastet werden, daher empfehlen wir auf die Verwendung zu verzichten. Zudem schaltet sich dieser Ausgang ab, wenn sich der Motortreiber im Sleep-Mode befindet
GND
Masse Signal
OUTA
OUTA
Ausgang zum Motor
OUTB
OUTB
Ausgang zum Motor
PWM
PWM
Pulsweitenmodulationseingang : ein digitales PWM-Signal an diesem Pin, das dem Signal an den Motorausgängen entspricht. Liegt hier ein LOW Signal an, so wird der Motor gebremst.
DIR
DIR
Richtungseingang
Wenn hier ein High Signal anliegt, fließt der Strom von OutA nach OutB.
Wenn ein Low Signal anliegt, fließt der Strom umngekehrt von OutB nach OutA
SLP
SLP
Über diesen Pin kann der Motortreiber abgeschaltet bzw. in einen Sleep-Mode versetzt werden. Standardmäßig ist der Motortreiber aktiviert, um ihn abzuschalten muss dieser Pin auf Low gezogen werden.
FLT
FLT
Ein Open-Drain-Ausgang, der per Mikrocontroller oder Widerstand auf High hochgezogen werden sollte. Der Ausgang wird dann auf LOW geschaltet, falls ein Fehler auftritt, beispielsweise Übertemperatur, Unterspannung, Kurzschluss etc. Der Motortreiber schaltet bei einigen Fehlern automatisch ab und bei Beseitigung wieder ein.
Achtung: Bei Übertemperatur wird nicht abgeschaltet.
Es wird empfohlen Ausgangsstrom und Fehlerpin per Mikrocontroller dementsprechend zu überwachen.
CS
CS
Dieser Pin dient zur Strommessung. Er liefert als Ausgangssignal 0,02V pro Ampere + einmalig 0,05V Grundspannung.
VREF
VREF
Über einen Widerstand von VREF nach GND kann der Ausgangsstrom begrenzt werden. Wird dieser Pin nicht belegt, so ist die maximale Strombegrenzung auf 50A eingestellt Die Höhe des Widerstandes kann aus der unteren Grafik entnommen werden. Ein 100kOhm Widerstand würde beispielsweise den Strom auf ca. 30A beschränken.
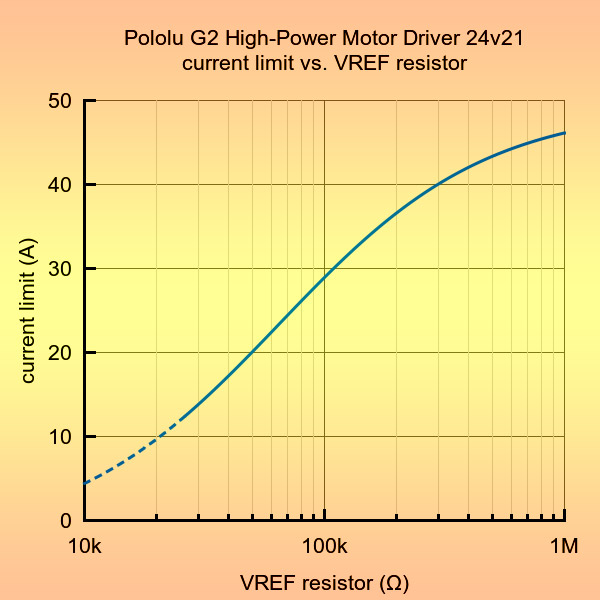
Über einen Widerstand wird der Strom begrenzt
Bezugsquellen für diesen oder ähnlichen Motortreiber










Letzte Aktualisierung am 26.03.2025 / * Affiliate Links
oder einfach über diesen Link: <jetzt per Ebay suchen>
Weitere Links zum Thema Motortreiber
- Geeignetes Forum für Diskussionen und Fragen
- Motortreiber Projekte und Komponenten
- Getriebemotoransteuerung in RN-Wissen
- Englische Dokumentation Pololu G2 High-Power Motor Driver 24v21
- Motorberechnung für Modelbau oder Roboter
Ein wirklich leistungsstarker Motortreiber der sich auch für viele Outdoor-Projekte, welche oft einen starken Antriebsmotor benötigen, sehr gut eignet. Sowohl für 6V, 12v und 24V Projekte.


