
Eine preiswerte und flexible Schrittmotoransteuerung die im Gegensatz zu vielen herkömmlichen Schrittmotoransteuerungen auf vielfältige Weise angesteuert werden kann. Das Schrittmotor Board RN-Schrittmotor verfügt über 3 Möglichkeiten der Schrittmotor Ansteuerung. Entweder per I2C-Bus, per RS232-Schnittstelle oder im herkömmlichen Taktmodus mit Takt und Richtungseingängen.
Auf diese Weise können sowohl PCs aber auch Mikrocontroller das Board bequem ansteuern. Eine eingebaute Eigenintelligenz entlastet PC und Controllerboard durch eine automatische Stromregelung und vielfältige und genaue Funktionen zum Ausführen von gezielten Schrittenfolgen. Die Motoren können natürlich völlig unabhängig aber auch gleichzeitig angesteuert werden. Bis zu 30 Volt Motorspannung und Phasenströme bis 2A sind möglich!
Features und Leistungsmerkmale dieses Schrittmotor-Projektes
- Deutlich höheres Drehmoment (Motorkraft) durch automatische PWM-Stromregelung gegenüber Schrittmotor Ansteuerung mit fester Spanung
- Voll- und Halbschrittmodus (im I2C-Betrieb, in RS232-Betrieb und bei Taktsteuerung)
- Maximal zulässige Strombegrenzung (bei Schrittmotor Strangstrommbegrenzung) kann durch einfachen Befehl von einem Controller oder PC zwischen ca. 100mA und max. 2A festgelegt werden. Kein rumschrauben mehr an Potis!
- Auch wenn kurzzeitig höhere Belastungen möglich sind, wird eine maximale Dauerbelastung von ca. 2 – 3 A pro Schrittmotor (Stangstrom 1 bis 1,5 A) empfohlen
- Getrennte Eingänge für Motorspannung und Betriebsspannung. Die Motorspannung kann 7V bis 35V annehmen. Die Betriebsspannung darf zwischen 7 und 24V liegen. Durch Brückung kann man auch mit einer Spannung auskommen.
- Es können nahezu alle bipolaren Schrittmotoren beliebiger Nennspannung ca. 3V bis zur Motorspannung (max 35V) angesteuert werden. Beispiel: Sie können auch einfach einen 4V Motor an ein Board mit 9V oder 12V anschließen, der Motor wird nicht überlastet da der max. Strom eingestellt wird. Dieses Schrittmotor arbeitet etwas ähnlich wie die beliebte L297/L298 Schaltung, bietet jedoch mehr High Level-Funktionen
- Durch die Verwendung eines größeren programmierten Controllers benötigt das ganze Board nur wenig Bauteile. Dies reduziert Kosten und die großzügige Dimensionierung der Platinenmaße erleichtert den Aufbau.
- Ein mitgelieferter Demo-Steuerprogramm erlaubt die Ansteuerung der Schrittmotoren bequem per Mausklick. Durch die Möglichkeit unterschiedliche Ströme und Geschwindigkeiten einzustellen, lassen sich Schrittmotoren auch optimal austesten.
- VB6-Quellcode des Steuerprogramms steht zum Download bereit. Natürlich kann man sich auch sehr leicht ein Programm in einer anderen Programmiersprache erstellen
- Übermittelt wird nur der Befehl der beschreibt wieviel Schritte ein bestimmter Motor in welcher Geschwindigkeit und Drehrichtung erfolgen soll. Um die Generierung und das zählen der Schritte kümmert sich das Board völlig automatisch. Dadurch wird der steuernde Controller oder PC erheblich entlastet
- 255 exakte Geschwindigkeitsstufen sind möglich
- Bei jeder Geschwindigkeit kann auch ein Beschleunigungswert angegeben werden. Dadurch können die Motoren langsamer beschleunigt werden (eine Rampe). So sind auch höhere Geschwindigkeiten ohne Schrittverlust möglich. Das gleiche ist auch beim Abbremsen möglich.
- Drehrichtung und max Strombedarf jederzeit änderbar
- Viele Vorgaben können dauerhaft im Board (EEPROM) abgespeichert werden
- Endlosfunktion, welche Schrittmotoren solange dreht bis ein Stopp Befehl kommt
- Schrittzähler, die ausgeführten Schritte der Motoren können jederzeit abgerufen werden, somit lässt sich exakt die Länge der gefahrenen Strecke berechnen
- Getrennter Strom für Halt, Beschleunigung und Betrieb einstellbar. Somit kann das Board wahlweise bei Motorstillstand automatisch einen geringeren Strom einstellen um z.B. die Batterie zu schonen.
- Neben I2C, RS232 kann das Board auch ganz normal über Taktleitungen, Richtungsleitung angesteuert werden, also so wie die meisten anderen Boards. So kann es auch mit üblichen Schrittmotorprogrammen für den PC angesteuert werden. Die Taktleitungen sind dann mit dem Druckerport zu verbinden (hier sind die Hinweise des jeweiligen PC Programmes zu beachten).
- Zwei Taster erlauben den schnellen Test des Boards auch ohne das ein anzusteuerndes Board oder PC vorhanden sein muss. Dies erleichtern Anfängern den Anschluss der Motoren.
- LED signalisiert wenn die Betriebsspannung nicht ausreicht um den Schrittmotor-Nennstrom (also maximale mögliche Leistung) bei der gewählten Geschwindigkeit zu erreichen. Eine recht nützliche Analysefunktion.
- Zur Steuerung des Board´s würde im Notfall ein RS232 TX PORT reichen. Bei der Boards wie z.B. RN-Control oder einem Arduino Uno könnte fast jeder Port dafür verwendet werden wenn in Basic programmiert wird. Ideal sind jedoch zwei Ports um auch die Rückmeldungen des Motorboards auswerten zu können.
- Ansteuerung über beliebige Controller z.B. Arduino-Boards, Raspberry Pi, RN-Control, RNBFRA, RN-Mega8Plus, RN-MiniControl, PC und viele andere
- Europaformat nach Roboternetz-Definition. Dadurch mit anderen RN-Boards nach Roboternetz-Standard huckepack verschraubbar.
- Programmbeispielen für RN-Control stehen zum Download bereit
- Eagle-Datei für Platinenlayout steht zum Download bereit
- Firmware für Programmierung des AVR-Controllers von RN-Schrittmotor steht kostenlos zum Download bereit (Quellcode wird nicht benötigt, kann jedoch als Option für eigene Firmware-Entwicklungen erworben werden)
RN-Schrittmotor: Befehlsübersicht
Hier eine Kurzübersicht der Befehle die das Schrittmotorboard per RS232 oder I2C versteht. Die genauere Erläuterung per Parametern folgen dann etwas weiter unten in diesem Beitrag.
| Befehls Code | Funktion des Befehles |
|---|---|
| 10 | Motorstrom festlegen |
| 11 | Anlauf Motorstrom festlegen (Motorboard nutzt eventuell kurzzeitig einen höheren Anlaufstrom) |
| 12 | Haltestrom für Stillstand festlegen |
| 13 | Vollschritt oder Halbschrittmodi festlegen (gilt für beide Motoren) |
| 14 | Schrittzähler auf Null setzen |
| 50 | Motor einschalten / Motorstellung halten (Haltestrom aktiv) |
| 51 | Motor komplett ausschalten |
| 52 | Drehrichtung festlegen |
| 53 | Geschwindigkeit und Beschleunigung festlegen |
| 54 | Motoren Endlos bis zu einem Stopbefehl drehen |
| 100 | Reserviert – derzeit nicht nutzen |
| 101 | Motorstatus abrufen (ob er steht, noch dreht) |
| 102 | Aktuell gedrehte Schrittzahl abrufen (daraus lässt sich Wegstrecke errechnen) |
| 103 | Letzte Befehlsbestätigung abrufen |
| 200 | Schrittmotormodi einstellen (Intelligente RS232/I2C oder passive Taktsteuerung) |
| 201 | CRC-Prüfsummenmode aktivieren bzw. deaktivieren |
| 202 | I2C Slave ID festlegen |
| 254 | Eeprom Werte abrufen |
| 255 | Firmware-Version,Copyright, Betriebsmodi und Slave-ID werden per RS232 ausgegeben |
RN-Schrittmotor: Aufbau des Schrittmotor Boards
 Der Aufbau der Schaltung ist durch eine vorgefertigte Platine und die überschaubare Anzahl an Bauelementen völlig problemlos auch von Einsteigern mit Elektronik Grundkentnissen zu bewerkstelligen. Das Eagle-Platinenlayout steht kostenfrei zum Download bereit. Über einen Leiterplattenhersteller (siehe Empfehlung Leiterplattenhersteller) kann man einfach eine Leiterplatte anfertigen lassen. Wenn man sich mit der CAD Software Eagle etwas aus kennt, kann man zuvor sogar eigene individuelle Änderungen am Layout vornehmen. Zum Teil sind Leiterplatten auch preiswert über Ebay erhältlich, versuchen Sie es über diesen Ebay Link*
Der Aufbau der Schaltung ist durch eine vorgefertigte Platine und die überschaubare Anzahl an Bauelementen völlig problemlos auch von Einsteigern mit Elektronik Grundkentnissen zu bewerkstelligen. Das Eagle-Platinenlayout steht kostenfrei zum Download bereit. Über einen Leiterplattenhersteller (siehe Empfehlung Leiterplattenhersteller) kann man einfach eine Leiterplatte anfertigen lassen. Wenn man sich mit der CAD Software Eagle etwas aus kennt, kann man zuvor sogar eigene individuelle Änderungen am Layout vornehmen. Zum Teil sind Leiterplatten auch preiswert über Ebay erhältlich, versuchen Sie es über diesen Ebay Link*
Durch den Bestückungsplan und die Bestückungsliste, etwas weiter unten in dieser Dokumentation, ist der Aufbau recht unkritisch. Auf schwierig zu lötende und schwierig reparierbare SMD Teile wurde wieder absichtlich verzichtet. Die Schaltung ist je nach Erfahrung in ca. 60 Minuten aufgebaut.
Dennoch einige Anmerkungen zu kleinen Hürden:
- Bei den Netzwerkwiderständen (RN1 bis RN4) auf die Polung achten. Der kleine Punkt auf dem Bauteil muss auf der Seite liegen wo die kleine 1 auf der Platine aufgedruckt ist.
- Bei den Kondensatoren (Elkos) die Polung beim einlöten beachten. Diese ist auf Bauelementen und Platine aufgedruckt.
- Den 16 Mhz Quarz mit ca. 2 mm Abstand zur Platinenoberfläche einlöten damit das Metallgehäuse keine Leiterbahnen verbindet.
- Nicht vergessen das die zwei IC´s gesockelt werden. Also erst Sockel einlöten und dann IC einsetzen.
- Die Polung der Leuchtdioden ist im Bestückungsdruck weiter hinten in dieser Anleitung zu ersehen. Die Anode ist das lange Bein einer LED, die Kathode das kurze Bein.
- Der Kühlkörper kann direkt auf die Platine aufgesetzt und von unten angeschraubt werden. Unterlegscheiben sind nicht notwendig da die darunterliegende Leiterbahn ebenfalls GND führt.
- Beim Einlöten der Motortreiber IC´s L298 ist zu bedenken das diese eine genaue Höhe einnehmen müssen, damit diese später bequem an den montierten Kühlkörper geschraubt werden können. Daher ist es empfehlenswert zuerst den Kühlkörper zu montieren. Der Kühlkörper wird durch zwei kurze handelsübliche 3mm Schrauben (ca. 4 bis 6 mm Länge) von der Unterseite der Platine angeschraubt. Er paßt genau auf die vordefinierten Löcher.
.Das waren eigentlich schon die besonderen Punkte die zu beachten sind. Ansonsten natürlich sauber mit einem 15 – 30 W Lötkolben oder einer Lötstation alles auf der Unterseite verlöten. Grundkenntnisse beim Löten werden schon empfohlen.
Nach dem Aufbau sollten Sie noch mal alle Lötpunkte kontrollieren. Wenn Sie dann Spannung anlegen, dann sollten in etwa 50 bis 100 mA Strom fließen. Ist der Strom deutlich höher, dann deutet das auf ein Lötfehler hin.
Wenn die Schrittmotoren korrekt angeschlossen sind, können diese nach dem Aufbau sofort über die Taster eingeschaltet werden. Sie sollten sich dann in langsamer Geschwindigkeit drehen. Für diesen Testmodi verwendet das Board die Grundeinstellungen, also ca. 100 mA Motorstrom.
Nach dem Aufbau muss man noch die Firmware (ein AVR-Programm das in binärer Form zum Download bereitsteht) in den Controller übertragen. Da das Board selbst keine kompatible ISP-Buchse besitzt, muss ein anderes Board zum programmieren des Controllers genutzt werden (z.B. RN-Control) . Oder man nutzt einen geeigneten Programmer mit 40 pol Sockel. Natürlich kann man auch eine eigene Firmware entwickeln, alle notwendigen Informationen dafür kann man aus dem Schaltplan entnehmen. Den Quellcode der aktuellen Firmware könnte man zur Hilfestellung für 99 Euro erwerben (Anfrage). Für die Funktion reicht aber auch das kostenlose HEX-File!

Erläuterung der Anschlüsse, Regler und Jumper
Bitte jeweiligen Punkt anklicken um die Beschreibung zu lesen.
Mot1
Anschluss des ersten Schrittmotor
Über diese 4 polige Schraubklemme (steckbare Schraubklemme) wird ein Schrittmotor angeschlossen. Dabei ist darauf zu achten das eine Wicklung an die beiden linken und eine Wicklung an die beiden rechten Schraubklemmen angeschlossen wird.
Dreht sich später ein Motor nicht, so muss eine Wicklung umgepolt werden. Dreht der Motor falsch herum, dann Wicklungen umtauschen.
Die Motoren werden bipolar angesteuert. Das bedeutet das eine eventuelle Mittelanzapfung an der Motorwicklung nicht benötigt wird.
Es können Motoren von Nennspannungen ab ca. 1V bis zur Motorspannung (max. 34V) angeschlossen werden. Dies ist deshalb möglich, da später vor dem einschalten zuerst mit einem Befehl der maximale Nennstrom übermittelt wird. Dadurch überwacht das Board automatisch die richtige Motorspannung, ein großer Vorteil gegenüber einfachen Schrittmotoransteuerungen die mit Festpannung arbeiten.
Wird der Nennstrom nicht eingestellt, so ist dieser auf maximal 100mA begrenzt. Dies kann bis zu 2A je Motor erhöht werden.
Mot2
Anschluss des zweiten Schrittmotor
Über diese 4 polige Schraubklemme (steckbare Schraubklemme) wird ein Schrittmotor angeschlossen. Dabei ist darauf zu achten das eine Wicklung an die beiden linken und eine Wicklung an die beiden rechten Schraubklemmen angeschlossen wird.
Dreht sich später ein Motor nicht, so muss eine Wicklung umgepolt werden. Dreht der Motor falsch herum, dann Wicklungen umtauschen.
Die Motoren werden bipolar angesteuert. Das bedeutet das eine eventuelle Mittelanzapfung an der Motorwicklung nicht benötigt wird.
Es können Motoren von Nennspannungen ab 1V bis zur Motorspannung (max. 34V) angeschlossen werden. Dies ist deshalb möglich, da später vor dem einschalten zuerst mit einem Befehl der maximale Nennstrom übermittelt wird. Dadurch überwacht das Board automatisch die richtige Motorspannung, ein großer Vorteil gegenüber einfachen Schrittmotoransteuerungen.
Wird der Nennstrom nicht eingestellt, so ist dieser auf maximal 100mA begrenzt. Dies kann bis zu 2A je Motor erhöht werden.
LOWPOW
Spannungsversorgung für Elektronik
Über diese Schraubklemme wird das Board mit der Betriebsspannung versorgt. Es reicht eine unstabilisierte Gleichspannung von ca. 7 bis 24V aus.
Plus + und Minus – sind auf der Platine markiert, von hinten gesehen ist Plus links!
HIGHPOW
Motorspannung
Über diese Schraubklemme wird die Motorspannung angelegt. Es reicht eine umstabilisierte Gleichspannung von ca. 7 bis maximal 35V aus. Damit das Board den Strom optimal regeln kann, sollte diese Spannung immer höher sein als die Nennspannung des Motors.
Plus + und Minus – sind auf der Platine markiert, von hinten gesehen ist Plus links!
Möchte man nur ein Spannung nutzen, so kann man die Schraubklemme “+” von LowPow und HighPow einfach überbrücken, dann darf allerdings nicht mehr als 24V angelegt werden.
RS232
PC kompatible RS232 Schnittstelle
Über ein Adapterkabel kann die serielle Schnittstelle des PC direkt mit dem Board verbunden werden. Dadurch können bei der RS232-Version des Boards alle Motorfunktionen per PC gesteuert werden.
Ein entsprechendes Demo-Steuerprogramm steht zum Download bereit
Hat man ein Controllerboard wie RN-Control, so kann man dieses ebenfalls über eine dreipolige Leitung miteinander verbinden.
Die Belegung entspricht der Roboternetz-Definition:
Pin 1 RX
Pin 2 GND
Pin 3 TX
I2C-Bus
I2C-Bus
Alle Funktionen des Boardes sind auch über ein I2C-Bus ansteuerbar. Es können sogar mehrere Boards an einen I2C-Bus angeschlossen werden.
Der I2C-Bus benötig nur 2 Leitungen für alle Funktionen. Entsprechend der Roboternetz-Definition wird hier ein 2×5 poliger Stecker angeschlossen. Die Belegung entspricht exakt der von den meisten Roboternetz-Projekten:
Pin 1 SCL (Taktleitung)
Pin 3 SDA (Datenleitung)
Pin 5 +5V (Kann über Jumper I2C5V getrennt werden)
Pin 7 +5V (Kann über Jumper I2C5V getrennt werden)
Pin 9 Batteriespannung Diese Leitung wird jedoch bei RN-Motor nicht benutzt
Pin 2,4,6,8 GND
Pin 10 INT Diese Leitung wird jedoch bei RN-Schrittmotor nicht benutzt
Ext1
Erweiterungsstecker 1
Dieser Anschluss hat derzeit keine Funktion. Er ist nur für eine eventuelle Erweiterung der Firmware vorsorglich angelegt worden. Sie sollten diesen Stecker nicht nutzen!
Wenn Sie eine eigene Firmware für das Board entwickeln, so können Sie diese Buchse mit eigenen Funktionen belegen. Die entsprechende Portbelegung kann man dem Schaltplan entnehmen.
Ext2
Erweiterungsstecker 2
Dieser Anschluss hat derzeit keine Funktion. Er ist nur für eine eventuelle Erweiterung der Firmware vorsorglich angelegt worden. Sie sollten diesen Stecker nicht nutzen!
Wenn Sie eine eigene Firmware für das Board entwickeln, so können Sie diese Buchse mit eigenen Funktionen belegen. Die entsprechende Portbelegung kann man dem Schaltplan entnehmen.
NOEXT
Jumper zum überbrücken von einem Erweiterungsstecker
Die Erweiterungbuchsen Ext1 und Ext2 sind in Reihe geschaltet. Dieser Jumper überbrückt eine davon. Derzeit hat dieser Jumper keine Bedeutung.
Entwickler einer eigenen Firmware können die Funktion über den Schaltplan analysieren.
JP1
Konfiguration
Über 6 Jumper können hier verschiedene Dinke eingestellt werden.
1: I2C-SDA PullupWiderstand wird aktiviert (Standard Offen) 2: I2C-SCL PullupWiderstand wird aktiviert (Standard Offen) 3: Pullup für Leitung MyOKInt ein (Standard geschlossen) 4: LED 1 und LED 2 einschalten (Standard geschlossen) 5: 5V auf I2C-Stecker legen (Standard geschlossen) 6: Betriebsspannung auf I2C-Stecker legen (Standard offen)
JP2
MOT1 PWM Port
Über diesen Jumper können verschiedene PWM-Ports für die Ansteuerung der Motor H-Bridges festgelegt werden. Je nach Firmware muss dieser Jumper immer eine spezielle Stellung besitzen.
Derzeit muss hie rein Jumper so eingesteckt werden das er die Nummern 1 und 2 überbrückt. Im Bestückungsplan ist die Position auch markiert.
JP3
MOT2 PWM Port
Über diesen Jumper können verschiedene PWM-Ports für die Ansteuerung der Motor H-Bridges festgelegt werden. Je nach Firmware muss dieser Jumper immer eine spezielle Stellung besitzen.
Derzeit muss hie rein Jumper so eingesteckt werden das er die Nummern 1 und 2 überbrückt. Im Bestückungsplan ist die Position auch markiert.
JP4
Taktsteuerung / Endschalter
Diese Steckklemme hat je nach Betriebsmodi unterschiedliche Aufgaben. Angesteuert werden die PIN´s mit normalen TTL-Pegel, also entweder 5V oder GND. Da über Pullup-Widerstände bereits 5V vorgegeben wird, müssen die Pin´s zur Aktivierung nur mit GND verbunden werden.
Ist der Taktsteuermodi aktiv, so ist die Belegung wie folgt beschrieben:
1. M1R Richtung von Motor 1 2. M1T Takt für Motor 1 (eine kurze GND Verbindung bewegt Motor um einen Schritt) 3. M2R Richtung von Motor 2 4. M2T Takt für Motor 1 5. EN Enable-Motoren ausschalten (GND schaltet Motoren ab) 6. MyOK Resevierter Port – derzeit nicht nutzen 7. GND 8. GND
Ist der intelligente Betriebsmode (I2C/RS232) aktiv, so ist die Belegung wie folgt beschrieben:
1 M1END1 Wahlweise externer Endschalter für Motor 1
Motor stoppt wenn GND anliegt!
2 M1END2 Wahlweise externer Endschalter für Motor 1
Motor stoppt wenn GND anliegt!
3 M2END1 Wahlweise externer Endschalter für Motor 2
Motor stoppt wenn GND anliegt!
4 M2END2 Wahlweise externer Endschalter für Motor 2
Motor stoppt wenn GND anliegt!
5 keine Bedeutung
6 MyOK Resevierter Port – derzeit nicht nutzen
7 GND
8 GNDJP5
5 Volt für externe Elektronik
Über diese Stiftleiste kann die stabilisierte 5V Spannung auch für externe Elektronik genutzt werden. Belastungen bis maximal 250 mA sind möglich
JP6
5 Volt für externe Elektronik
Über diese Stiftleiste kann die stabilisierte 5V Spannung auch für externe Elektronik genutzt werden. Belastungen bis maximal 250 mA sind möglich
Taster T1
Testschalter 1
Motor 1 wird in Endosdrehung (linksrum) versetzt. Erneutes drücken schaltet den Motor wieder aus. Der Schalter eignet sich vor allem um den Aufbau des Schrittmotorboards und den korrekten Anschluss der Motoren zu prüfen. Es wird der einprogrammierte Strom genutzt, vorgegeben ist 100mA.
Taster T2
Testschalter 2
Motor 2 wird in Endosdrehung (linksrum) versetzt. Erneutes drücken schaltet den Motor wieder aus. Der Schalter eignet sich vor allem um den Aufbau des Schrittmotorboards und den korrekten Anschluss der Motoren zu prüfen. Es wird der einprogrammierte Strom genutzt, vorgegeben ist 100mA.
TASTER RESET
Motorboard wird in Grundstellung versetzt. Motoren werden ausgeschaltet
LED1
Die Leuchtdiode signalisiert verschiedene Dinge
Ein RESET wird durch kurzes Blinken der LED angezeigt.
Firmware übertragungen per ISP werden durch Flackern signalisiert
Wenn ein Motor läuft und die Betriebsspannung nicht ausreicht um den Nennstrom zur erreichen, leuchtet die LED auf.
LED2
Blinkt beim Einschalten oder RESET kurz, wenn die Taktsteuerung aktiviert ist.
LED3
Zeigt Status von M1R bzw. M1END1 an
LED4
Zeigt Status von M2R bzw. M2END1 an
LED5
Leuchtet bei Tastendruck von T1
LED6
Leuchtet bei Tastendruck von T2
LED7
Leuchtet immer wenn Board mit Betriebsspannung versorgt wird
RN-Schrittmotor: Wie sieht die Befehlssyntax aus?
Wie schon geschildert wird RN-Schrittmotor wahlweise über den I2C-Bus oder die serielle Schnittstelle RS232 angesteuert. Über beide Schnittstellen können die gleichen Befehle ausgeführt werden. Auch die Befehlssyntax ist über beide Schnittstellen nahezu identisch, so das man sich sehr schnell mit den Kommandos vertraut machen kann. Erwähnenswert ist noch das auch im Wechsel RS232 und I2C ohne eine Umschaltung genutzt werden kann.
Bei der Befehlssyntax wurde bewusst auf Übertragungssicherheit und einfache Handhabung Wert gelegt. Jeder Befehl besteht grundsätzlich aus 9 Byte, auch wenn nicht immer alle Bytes benötigt werden.
Die grundsätzlich Befehlssyntax für die RS232 Befehle sieht wie folgt aus:
1. Byte: Kennung immer 33 also ASCII-Zeichen “!”
2. Byte: Kennung immer 35 also ASCII-Zeichen “#”
3. Byte: Befehlscode (dieses Byte legt die Art des Befehles fest)
4. Byte: Motor (endweder 1 oder 2 oder 3 für beide)
5. Byte: Parameter 1 (je nach Befehl)
6. Byte: Parameter 2 (je nach Befehl)
7. Byte: Parameter 3 (je nach Befehl)
8. Byte: Parameter 4 (je nach Befehl)
9. Byte: CRC-Prüfsumme (falls CRC Mode genutzt wird)
Beispiel wie ein Befehl aussehen kann (in Bascom Basic):
Print "!#": chr(54);chr(3);chr(0); chr(0); chr(0); chr(0); chr(0);
Dieser Befehl würde beide Motoren in Endlosdrehung versetzen. Da dieser Befehl außer dem Motor keine Parameter benötigt, werden für die letzte 5 Bytes Nullen übertragen.
Befehlssyntax für I2C Übertragung:
Wie schon geschildert, ist die Befehlssyntax auch beim I2C-Bus nahezu identisch. Da jedoch I2C-Übertragungen in der Praxis sicherer sind, ist die Syntax leicht unterschiedlich. Eine Kennung ist hier nicht notwendig.
Die Syntax sieht wie folgt aus:
1. Byte: Befehlscode (dieses Byte legt die Art des Befehles fest)
2. Byte: Motor (endweder 1 oder 2 oder 3 für beide)
3. Byte: Parameter 1 (je nach Befehl)
4. Byte: Parameter 2 (je nach Befehl)
5. Byte: Parameter 3 (je nach Befehl)
6. Byte: Parameter 4 (je nach Befehl)
7. Byte: CRC-Prüfsumme (falls CRC Mode genutzt wird)
Es werden also generell immer 7 Bytes übertragen, auch wenn einige Befehle weniger Bytes benötigen. Für oberes Beispiel müsste der Befehl also bei der I2C Übertragung wie folgt aussehen (Bascom Basic):
I2cstart I2cwbyte slaveid I2cwbyte 54 I2cwbyte 3 I2cwbyte 0 I2cwbyte 0 I2cwbyte 0 I2cwbyte 0 I2cwbyte 0 I2cstop
Zusätzliche Sicherheit bei der Befehlsübertragung
Die zuvor geschilderte Befehlssyntax reicht gewöhnlich für die Übertragung von Befehlen aus. Werden bei der Übertragung jedoch Störungen erwartet, zum Beispiel bei sehr langen Leitungsverbindungen oder ungewöhnlichen Störquellen, so könnten in sehr seltenen Fällen Befehle nicht richtig erkannt werden.
Möchte man jedoch sicherstellen das die Schrittmotoransteuerung RN-Schrittmotor genau das tut, was es soll, so gibt es verschiedene Möglichkeiten. Sie könnten einfach die Rückmeldung des Boards prüfen. Wird ein Befehl korrekt ausgeführt, so wird über die RS232 Schnittstelle immer der ASCII-Code 42 (“*”) zurück geliefert.
Wird ein Befehl nicht korrekt ausgeführt, so wird ein Fehlercode zurückgegeben. Da bei der I2C-Übertragung keine Rückgabe erfolgt, kann man über einen I2C-Befehl (Befehlscode 103) den Status als Abfrage selektieren. Der nächste I2C Lesebefehl würde dann ebenfalls die 42 oder den Fehlercode des letzten Befehles liefern.
Fehlercode Fehlerbeschreibung 1 CRC Prüfsumme stimmt nicht 2 Unbekannter Befehl 42 Kein Fehler, Befehl korrekt ausgeführt
Wahlweise zusätzliche Sicherheit durch CRC-Prüfsumme
Wem die geschilderte Methode nur nicht ausreicht, kann auch das falsche interpretieren von Befehlen durch eine CRC-Checksumme ausschließen. Dazu muss man lediglich den CRC-Befehlsmodi über den Befehlscode 201 aktivieren.
Durch diese Aktivierung erwartet RN-Schrittmotor am Schluss jeder Befehlsbyte-Folge noch ein zusätzliches CRC-Byte. Dieses CRC-Byte bildet ein 8-Bit CRC-Summe von dem Befehlscode bis zum letzten Parameterbyte.
Bei folgenden Beispiel würde also der CRC-Prüfsumme aus den Bytes 54+3+0+0+0+0 berechnet. Also die CRC Summe wird immer aus Befehl und Parametern berechnet. Diese CRC-Prüfzahl würde dann im letzten Byte übertragen.
Print "!#": chr(54);chr(3);chr(0); chr(0); chr(0); chr(0); chr(0);
In Bascom-Basic kann man im übrigen sehr einfach den Bascom-Befehl Crc8 zum bilden dieser Prüfsumme nutzen.
Möchte man diese Prüfsumme in einer anderen Programmiersprache berechnen benötigt man eine entsprechende Funktion. Hier ein Beispiel für Visual Basic auf dem PC:
Function BerechneCRC(s As String) As Byte
Dim j As Byte
Dim k As Byte
Dim crc8 As Byte
Dim m As Byte
Dim x As Integer
crc8 = 0
For m = 1 To Len(s)
x = Asc(Mid(s, m, 1))
For k = 0 To 7
j = 1 And (x Xor crc8)
crc8 = Fix(crc8 / 2) And &HFF
x = Fix(x / 2) And &HFF
If j <> 0 Then
crc8 = crc8 Xor &H8C
End If
Next k
Next
Docrc8 = crc8
End Function
RN-Schrittmotor: Die Übersicht über RS232-Schrittmotor Befehle
RN-Schrittmotor arbeitet wie bereits geschildert immer mit Befehlen konstanter Länge. Über RS232 werden immer 9 Byte und über I2C immer 7 Byte (ohne Signatur) übertragen. Aus dieser Tabelle kann man sehr leicht die Syntax für beie Schnittstellen entnehmen. Zu beachten ist noch das RN-Schrittmotor im RS232 Betrieb immer mit 9600 Baud / 8 Bit arbeitet. Die einzelnen Befehle können bei den meisten Programmiersprachen durch einfache Print-Anweisungen erfolgen. Wird in Bascom-Basic programmiert, kann z.B. fast jeder Port als RS232 benutzt werden.
Motorstrom einstellen
Der Strom der gewöhnlich zum Drehen des Motors verwendet werden soll.
Vorgegeben ist 100 mA
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 10 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 x Low Byte – Strom in mA
6 4 x High Byte – Strom in mA
7 5 x Gültigkeit der Einstellung:
0=Nur bis zum nächsten Reset einstellen
1=Dauerhaft einstellen und im Eeprom sichern
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Gibt für beide Motoren 100 mA Motorstrom vor
Print "!#": chr(10);chr(3);chr(100); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Gibt für beide Motoren 100 mA Motorstrom vor
I2cstart I2cwbyte slaveid I2cwbyte 10 'Befehl I2cwbyte 3 'Motoren I2cwbyte 100 'Strom Low Byte I2cwbyte 0 'Strom High Byte I2cwbyte 0 'Nur bis Reset einstellen I2cwbyte 0 'Par 4 hier beliebiger Wert da nicht benötigt I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
Anlaufstrom einstellen
Über diesen Befehl kann ein etwas höherer Anlaufstrom festgelegt werden. Das Motorboard verwendet dann kurzzeitig beim Beschleunigen des Motors einen etwas höheren Strom. Gewöhnlich ist das nicht notwendig.
Vorgegeben ist 100 mA
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 11 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 x Low Byte – Strom in mA
6 4 x High Byte – Strom in mA
7 5 x Gültigkeit der Einstellung:
0=Nur bis zum nächsten Reset einstellen
1=Dauerhaft einstellen und im Eeprom sichern
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Gibt für beide Motoren 100 mA Anlaufstrom vor
Print "!#": chr(11);chr(3);chr(100); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Gibt für beide Motoren 100 mA Anlaufstrom vor
I2cstart I2cwbyte slaveid I2cwbyte 11 'Befehl I2cwbyte 3 'Motoren I2cwbyte 100 'Strom Low Byte I2cwbyte 0 'Strom High Byte I2cwbyte 0 'Nur bis Reset einstellen I2cwbyte 0 'Par 4 hier beliebiger Wert da nicht benötigt I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
Haltestrom einstellen
Über diesen Befehl kann ein niedrigerer Strom definiert werden, welcher automatisch bei Stillstand des Motors fließt. Gewöhnlich reicht ein niedriger Strom zum halten der Position aus, daher kann ein niedriger Haltestrom die Erwärmung des Motor´s reduzieren als auch viel Energie sparen.
Der Haltestrom ist automatisch aktiv wenn der Motor steht, beim drehen schaltet die Steuerung automatisch wieder auf Anlauf– und dann Motorstrom. Lediglich im Taktsteuermode wird dieser Haltestrom nicht genutzt.
Vorgegeben ist 100 mA
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 12 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 x Low Byte – Strom in mA
6 4 x High Byte – Strom in mA
7 5 x Gültigkeit der Einstellung:
0=Nur bis zum nächsten Reset einstellen
1=Dauerhaft einstellen und im Eeprom sichern
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Gibt für beide Motoren 100 mA Haltestrom vor
Print "!#": chr(12);chr(3);chr(100); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Gibt für beide Motoren 100 mA Haltestrom vor
I2cstart I2cwbyte slaveid I2cwbyte 12 'Befehl I2cwbyte 3 'Motoren I2cwbyte 100 'Strom Low Byte I2cwbyte 0 'Strom High Byte I2cwbyte 0 'Nur bis Reset einstellen I2cwbyte 0 'Par 4 hier beliebiger Wert da nicht benötigt I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
Vollschritt- oder Halbschrittmodus
Über diesen Befehl kann wahlweise der Vollschritt oder Halbschrittmodus aktiviert werden. Diese Einstellung gilt generell für beide Motoren. Im Halbschrittmodus sind doppelt soviele Schritte für eine Umdrehung notwendig. Vorgegeben ist der Vollschrittmodus.
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 13 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 x Modus:
0=Vollschrittmodus
1=Halbschrittmodus
6 4 x Gültigkeit der Einstellung:
0=Nur bis zum nächsten Reset einstellen
1=Dauerhaft einstellen und im Eeprom sichern
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Schaltet beide Motoren in den Halbschrittmodus
Print "!#": chr(13);chr(3);chr(1); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Schaltet beide Motoren in den Halbschrittmodus
I2cstart I2cwbyte slaveid I2cwbyte 13 'Befehl I2cwbyte 3 'Motoren I2cwbyte 1 'Halbschrittmodi I2cwbyte 0 'Nur bis Reset einstellen I2cwbyte 0 'Par 3 hier beliebiger Wert da nicht benötigt I2cwbyte 0 'Par 4 hier beliebiger Wert da nicht benötigt I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
Schrittzähler auf 0 setzen
RN-Schrittmotor zählt jeden Schritt den der Motor macht mit. Mit diesem Befehl kann dieser Schrittzähler wieder auf 0 gesetzt werden.
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 14 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 0 Nicht benötigt, daher 0 übertragen
6 4 0 Nicht benötigt, daher 0 übertragen
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Setzt den Schrittzähler von Motor 2 auf 0
Print "!#": chr(14);chr(2);chr(0); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Setzt den Schrittzähler von Motor 2 auf 0
I2cstart I2cwbyte slaveid I2cwbyte 14 'Befehl I2cwbyte 2 'Motoren I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
Motor einschalten / Stellung halten
Dieser Befehl schaltet den Motor ein aber dreht diesen nicht. Es wird lediglich die augenblickliche Position mittels Haltestrom gehalten. Hat sich der Motor zuvor durch einen anderen Befehl gedreht, so wird dieser durch diesen Befehl gestoppt und die Position gehalten.
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 50 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 0 Nicht benötigt, daher 0 übertragen
6 4 0 Nicht benötigt, daher 0 übertragen
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Schaltet Motor 2 ein bzw. stoppt diesen
Print "!#": chr(50);chr(2);chr(0); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Schaltet Motor 2 ein bzw. stoppt diesen
I2cstart I2cwbyte slaveid I2cwbyte 50 'Befehl I2cwbyte 2 'Motoren I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
Motor ausschalten
Dieser Befehl schaltet den Motor komplett aus, also auch kein Haltestrom!.
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 51 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 0 Nicht benötigt, daher 0 übertragen
6 4 0 Nicht benötigt, daher 0 übertragen
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Schaltet Motor 2 aus
Print "!#": chr(51);chr(2);chr(0); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Schaltet Motor 2 aus
I2cstart I2cwbyte slaveid I2cwbyte 51 'Befehl I2cwbyte 2 'Motoren I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
Drehrichtung festlegen
Dieser Befehl legt fest ob der Motor links oder rechts herum gedreht wird.
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 52 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 x Drehrichtung:
0=links herum
1=rechts herum
6 4 0 Nicht benötigt, daher 0 übertragen
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Drehrichtung von Motor 2 rechts
Print "!#": chr(52);chr(2);chr(1); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Drehrichtung von Motor 2 rechts
I2cstart I2cwbyte slaveid I2cwbyte 52 'Befehl I2cwbyte 2 'Motoren I2cwbyte 1 'Drehrichtung I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
Geschwindigkeit und Beschleunigung festlegen
Über diesen Befehl wird festgelegt wie schnell sich der Motor drehen soll. Zudem wird ein Beschleunigungswert angegeben. Ist der Beschleunigungswert 0 so wird die gewählte Geschwindigkeitsstufe sofort aktiviert. Bei anderen Werten wird die Geschwindigkeit langsamer verändert, eine Art Rampe. Das langsamere Anfahren macht Sinn wenn hohe Geschwindigkeiten notwendig sind, man reduziert dadurch die Gefahr eines Schrittverlustes.
Die Geschwindigkeit errechnet sich wie folgt: G=1000 / (Geschwindigkeit+1) G= Schritte pro Sekunde
Also höhere Geschwindigkeiten als 1000 Schritte sind mit der vorhanden Firmware nicht möglich. Mit einer anderen Firmware ist eventuell auch eine etwas höhere Taktrate denkbar, ich habe das aber nicht getestet und kann es daher nicht garantieren.
Schrittmotor Geschwindigkeit der Stufen:
0= 1000 Schritte pro Sek.
1= 500 Schritte pro Sek.
2= 333 Schritte pro Sek.
3= 250 Schritte pro Sek.
4= 200 Schritte pro Sek.
5= 167 Schritte pro Sek
6= 142 Schritte pro Sek
7= 125 Schritte pro Sek
8= 111 Schritte pro Sek
…
255= 4 Schritte pro Sekunde
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 53 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 x Zielgeschwindigkeit 0 bis 255
(0=ganz schnell 255= ganz langsam)
6 4 x Beschleunigung 0 bis 255
0=schlagartig ändern
255 Geschwindigkeit ganz langsam ändern
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Beide Motoren schlagartig recht schnell (Stufe 10) drehen
Print "!#": chr(53);chr(3);chr(10); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Beide Motoren schlagartig recht schnell (Stufe 10) drehen
I2cstart I2cwbyte slaveid I2cwbyte 53 'Befehl I2cwbyte 2 'Motoren I2cwbyte 10 'Beschleunigung I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
Endlosdrehung starten
Dies ist wohl der wichtigste Befehl Er kann ganz am Anfang stehen, sobald dieser Befehl kommt beginnen den gewählten Motoren sich endlos mit der eingestellten Geschwindigkeit, Drehrichtung, Motorstrom zu drehen, egal ob Motor vorher ausgeschaltet oder im Stillstand war.
Die Motoren drehen solange bis ein Stopp- oder Haltebefehl kommt. Oder aber bis ein Endschalter die Signaleingänge M1END oder M2END auf GND legt.
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 54 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 0 Nicht benötigt, daher 0 übertragen
6 4 0 Nicht benötigt, daher 0 übertragen
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Dreht beide Motoren endlos
Print "!#": chr(54);chr(3);chr(0); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Dreht beide Motoren endlos
I2cstart I2cwbyte slaveid I2cwbyte 54 'Befehl I2cwbyte 3 'Motoren I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
Bestimmte Schrittzahl drehen
Sobald dieser Befehl kommt beginnen den gewählten Motoren sich eine bestimmte Schrittzahl mit der eingestellten Geschwindigkeit, Drehrichtung, Motorstrom zu drehen, egal ob Motor vorher ausgeschaltet oder im Stillstand war.
Die Motoren bleiben automatisch stehen wenn die Schrittzahl erreicht ist oder ein Stopp- oder Haltebefehl kommt. Oder aber bis ein Endschalter die Signaleingänge M1END oder M2END auf GND legt.
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 55 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 0 Low Byte Schrittzahl
6 4 0 High Byte Schrittzahl
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Dreht beide Motoren 200 Schritte
Print "!#": chr(55);chr(3);chr(200); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Dreht beide Motoren 200 Schritte
I2cstart I2cwbyte slaveid I2cwbyte 55 'Befehl I2cwbyte 3 'Motoren I2cwbyte 200 'Schrittzahl I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
Motorstatus abrufen
Über diesen Befehl kann man ermitteln ob ein Motor noch dreht oder bereits gestoppt hat..
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 101 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 0 Nicht benötigt, daher 0 übertragen
6 4 0 Nicht benötigt, daher 0 übertragen
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Ermittelt ob Motor 1 noch dreht
Print "!#": chr(101);chr(1);chr(0); chr(0); chr(0); chr(0); chr(0);
Liefert ein zurück:
Erste Byte 0 =Aus 1 =Stop (Haltestrom) 2 =Dreht bis Fahrschritte erreicht 3 =Dauerdrehung bis Stop Zweite Byte übliche Rückgabecode (42)
I2C-Beispiel
Ermittelt ob Motor 1 noch dreht
I2cstart I2cwbyte slaveid I2cwbyte 101 'Befehl I2cwbyte 1 'Motoren I2cwbyte 0 I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop Da es bei I2C-Bus keine direkten Rückgabewerte gibt, muss nach dem Befehl noch ein Lesezugriff erfolgen: I2cstart I2cwbyte slaveid+1 I2crbyte motorstatus, Nack I2cstop
Bewegte Schrittzahl abrufen
Über diesen Befehl kann die Schrittzahl, die sich der Motor bislang gedreht hat, abgerufen werden. Es handelt sich hier um ein Long Wert..
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 102 Befehlscode
4 2 m Motor für den dieser Befehl gilt:
1= Motor 1
2= Motor 2
3= beide Motoren
5 3 0 Nicht benötigt, daher 0 übertragen
6 4 0 Nicht benötigt, daher 0 übertragen
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Ermittelt die gefahrenen Schritte von Motor 1
Print "!#": chr(102);chr(1);chr(0); chr(0); chr(0); chr(0); chr(0);
Liefert ein zurück:
1.Byte: Schrittanzahl (Low Byte von Low Word) 2.Byte: Schrittanzahl (High Byte von Low Word) 3.Byte: Schrittanzahl (Low Byte von High Word) 4.Byte: Schrittanzahl (High Byte von High Word)
I2C-Beispiel
Ermittelt die gefahrenen Schritte von Motor 1
I2cstart I2cwbyte slaveid I2cwbyte 102 'Befehl I2cwbyte 1 'Motoren I2cwbyte 0 I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop Da es bei I2C-Bus keine direkten Rückgabewerte gibt, muss nach dem Befehl noch ein Lesezugriff erfolgen. In dem folgenden Beispiel wurden die Bytewerte gleich in einen Long Wert umgerechnet: I2cstart I2cwbyte slaveid+1 I2crbyte Temp , Ack Schritte = Temp I2crbyte Temp , Ack Ltemp = Temp * 256 Schritte = Schritte + Ltemp I2crbyte Temp , Ack Ltemp = Temp * 65536 Schritte = Schritte + Ltemp I2crbyte Temp , Nack Ltemp = Temp * 16777216 Schritte = Schritte + Ltemp I2cstop
RN-schrittmotor Schnittstellenmodus festlegen
Über diesen Befehl wird festgelegt ob die Schrittmotor im intelligenten I2C/RS232 Modus oder aber im passiven Taktmodus arbeiten soll.
Wenn der Taktmodus aktiviert wird, dann werden die Motoren ausschließlich über die Eingänge der Steckklemme JP4 angesteuert (siehe Beschreibung JP4). Eine solche manuelle Ansteuerung ist mit PC-Schrittmotorsoftware oder aber auch mit Controllerboards möglich. Die Schaltung ähnelt dann weiterhin einer L297/L298 Schaltung, das bedeutet der Motorstrom wird weiterhin von RN-Schrittmotor geregelt, allerdings gibt es in diesem Mode keinen reduzierten Haltestrom. Über den EN-Pin können die Motoren aber abgeschaltet werden. Die Schrittmotorbefehle per RS232 / I2C sind im Taktmodus teilweise deaktiviert und sollten nicht gemischt verwendet werden. Lediglich die Motorstromstärke oder die Aktivierung des intelligenten Modus sind natürlich weiterhin per RS232 / I2C möglich.
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 200 Befehlscode
4 2 x Schrittmotormodus:
0=Intelligent über RS232 und I2C Befehle
2=über Taktleitungen
5 3 0 Nicht benötigt, daher 0 übertragen
6 4 0 Nicht benötigt, daher 0 übertragen
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Intelligenten Modus aktivieren
Print "!#": chr(200);chr(0);chr(0); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Intelligenten Modus aktivieren
I2cstart I2cwbyte slaveid I2cwbyte 200 'Befehl I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
RN-Schrittmotor Eeprom Werte abrufen
Viele wichtige Einstellungen wie SlaveID, Motorstrom, Haltestrom usw. werden in RN-Schrittmotor dauerhaft in einem sogenannten Eeprom gespeichert. Normalerweise braucht man sich um deren Inhalt nicht kümmern, da die jeweiligen Befehle diese Werte ablegen und beim Reset auch wieder aktivieren.
Haben Sie jedoch vergessen welche Werte Sie einmal eingestellt haben, dann können Sie diesen Befehl nutzen um die Eeprom-Daten abzurufen. Es können bis zu 50 Bytes abgerufen werden, das sind mehr Byte als derzeit eigentlich in der Firmware genutzt werden.
RS232 I2C Wert Beschreibung
Byte Nr. Byte Nr.
1 - 33 Immer 33 (Ascii '!')
2 - 35 Immer 35 (Ascii '#')
3 1 254 Befehlscode
4 2 x Anzahl der Eeprom Bytes die zurückgegeben
werden sollen (1 bis 50)
5 3 0 Nicht benötigt, daher 0 übertragen
6 4 0 Nicht benötigt, daher 0 übertragen
7 5 0 Nicht benötigt, daher 0 übertragen
8 6 0 Nicht benötigt, daher 0 übertragen
9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Gibt die ersten 20 Byte des Eeprom´s aus
Print "!#": chr(254);chr(20);chr(0); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Gibt die ersten 20 Byte des Eeprom´s aus
I2cstart I2cwbyte slaveid I2cwbyte 254 'Befehl I2cwbyte 20 'Bytes I2cwbyte 0 I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop Da es bei I2C-Bus keine direkten Rückgabewerte gibt, muss nach dem Befehl noch ein Lesezugriff erfolgen: I2cstart I2cwbyte slaveid+1 I2crbyte byte1, ack I2crbyte byte2, ack ... I2crbyte byte20, Nack I2cstop
Die Bedeutung der zurückgegebenen Eeprom Bytes
Byte Nr. Bedeutung 0 I2C Slave ID 1 Motorstrom in mA Motor 1 Low-Byte 2 Motorstrom in mA Motor 1 High-Byte 3 Motorstrom in mA Motor 2 Low-Byte 4 Motorstrom in mA Motor 2 High-Byte 5 Haltestrom in mA Motor 1 Low-Byte 6 Haltestrom in mA Motor 1 High-Byte 7 Haltestrom in mA Motor 2 Low-Byte 8 Haltestrom in mA Motor 2 High-Byte 9 Anlaufstrom in mA Motor 1 Low-Byte 10 Anlaufstrom in mA Motor 1 High-Byte 11 Anlaufstrom in mA Motor 2 Low-Byte 12 Anlaufstrom in mA Motor 2 High-Byte 13 Schrittmotormodus 0=Vollschritt 1=Halbschritt 14 Schnittstellenmodus 1=Intelligent 2=Takt 15-24 derzeit nicht verwendet oder dokumentiert
Firmware-Version und Infos über RS232 ausgeben
Über diesen Befehl lassen sich wichtige Infos wie Slave-ID, Firmware-Version und Schnittstellenmodus im Klartext über RS232 ausgeben. Der Befehl kann zwar auch über I2C erfolgen, jedoch gibt dieser ausnahmsweise alle Daten nur über RS232 aus.
RS232 I2C Wert Beschreibung Byte Nr. Byte Nr. 1 - 33 Immer 33 (Ascii '!') 2 - 35 Immer 35 (Ascii '#') 3 1 255 Befehlscode 4 2 0 Nicht benötigt, daher 0 übertragen 5 3 0 Nicht benötigt, daher 0 übertragen 6 4 0 Nicht benötigt, daher 0 übertragen 7 5 0 Nicht benötigt, daher 0 übertragen 8 6 0 Nicht benötigt, daher 0 übertragen 9 7 CRC Wahlweise CRC-Prüfsumme
RS232-Beispiel
Copyright und Firmware-Informationen ausgeben
Print "!#": chr(255);chr(0);chr(0); chr(0); chr(0); chr(0); chr(0);
I2C-Beispiel
Copyright und Firmware-Informationen ausgeben
I2cstart I2cwbyte slaveid I2cwbyte 255 'Befehl I2cwbyte 0 I2cwbyte 0 I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 ' I2cwbyte 0 'CRC Falls CRC Mode aktiv dann hier CRC Wert angeben I2cstop
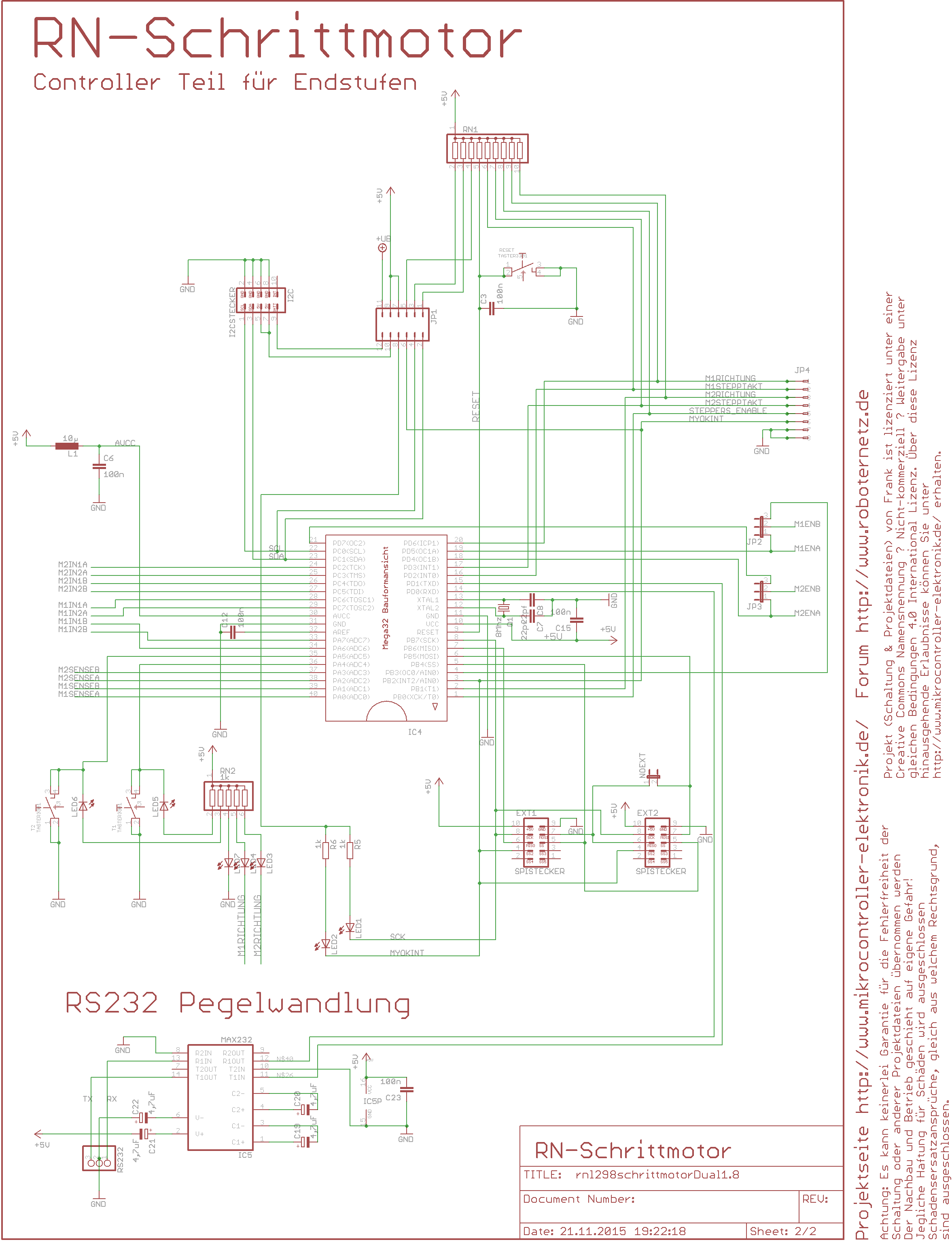
RN-Schrittmotor Schaltplan Teil 1
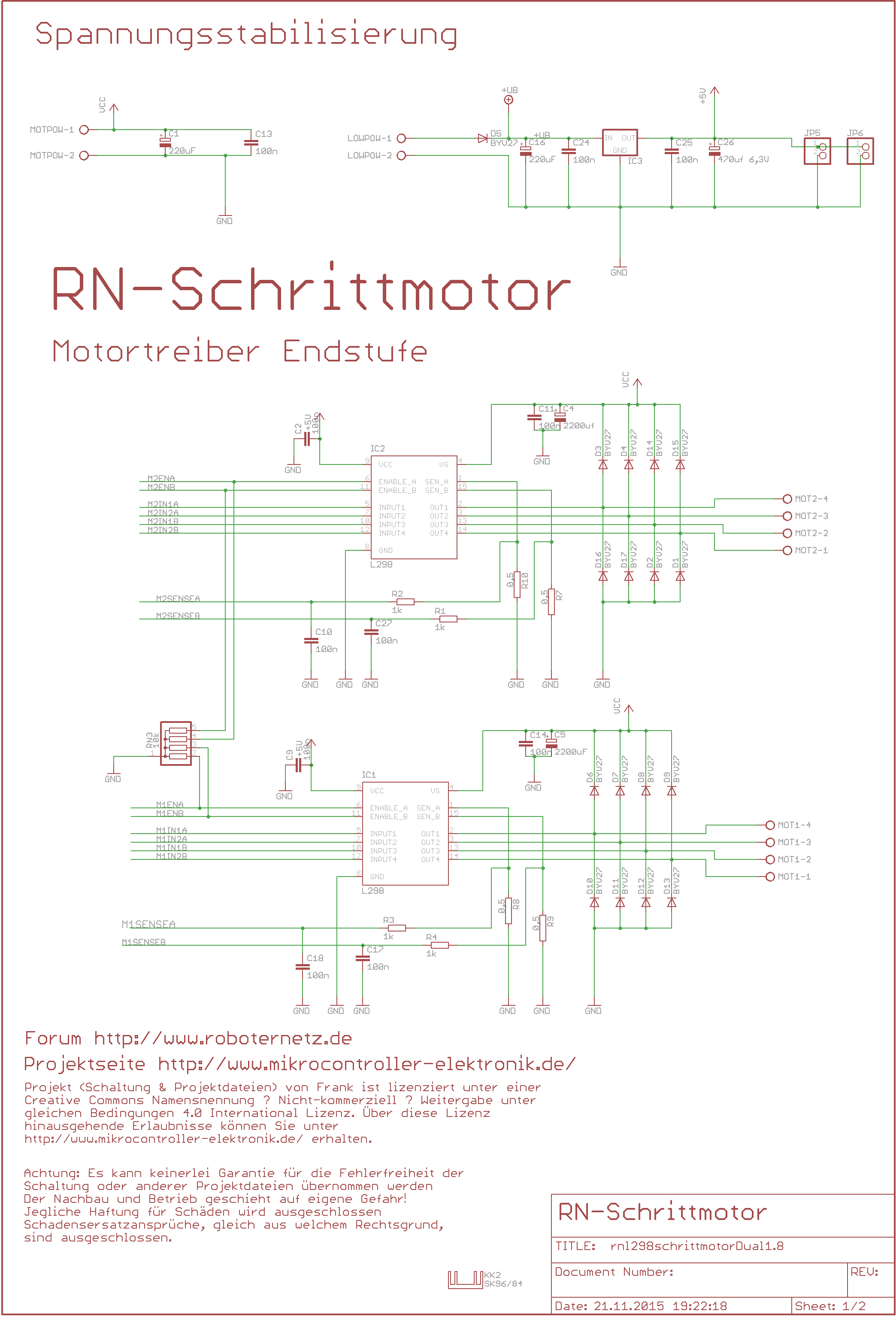
RN-Schrittmotor Schaltplan Teil 2
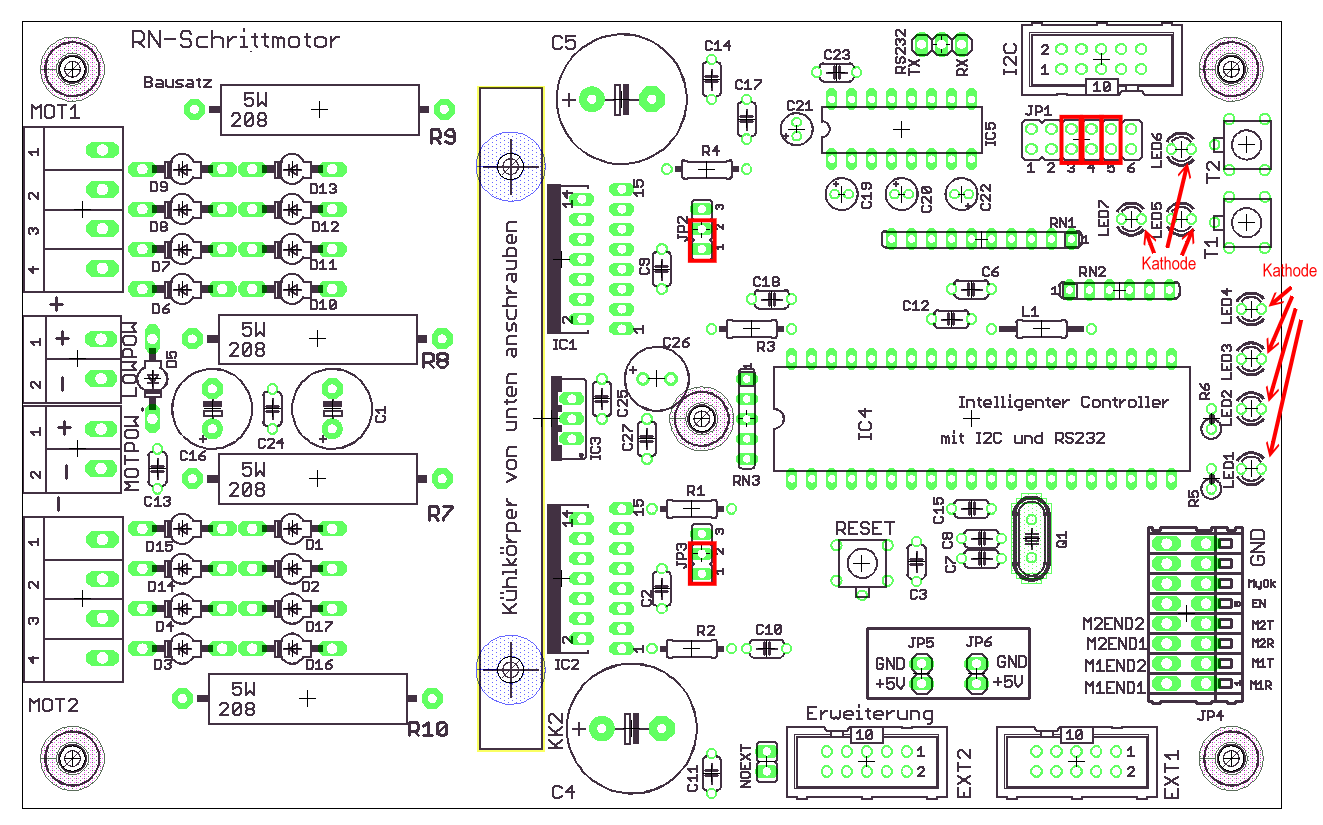
RN-Schrittmotor Bestückungsplan
RN-Schrittmotor Bauteile Bestückungsliste & Bestellliste
Platinenbezeichnung Beschreibung Link zur Bezugsquelle C2,C3,C6,C9,C10 100n Keramik Kondensator Reichelt* C11,C12,C13,C14,C15, C17,C18,C23,C25,C27 C1,C16 Elko 220uF 35V Reichelt* C26 Elko 470uF 6,3V Reichelt* C4,C5 Elko 2200uF 35V Reichelt* C7,C8 Keramik Kondensator Reichelt* C19,C20,C21,C22 Elko 4,7uF Reichelt* D1,D2,D3,D4,D5, Diode Reichelt* D6,D7,D8,D9,D10, D11,D12,D13,D14,D15, D16,D17 EXT1,EXT2,I2C Wannenstecker 10pol Reichelt* IC1,IC2 L298 Motortreiber Reichelt* IC3 Spannungsregler 5V/2A Reichelt* IC4 Microcontroller ATMega32 Reichelt* IC5 RS232 Treiber Reichelt* JP1 Stiftleiste 2x6polig Reichelt* JP2,JP3,JP5,JP6,NOEXT Stiftleiste 2polig Reichelt* JP4 Wago Steckklemme 8 polig Reichelt* KK2 Kühlkörper HEATSINK Reichelt* L1 Induktivität 10uH Reichelt* LED1,LED7 Leuchdiode Low grün Reichelt* LED2,LED5,LED6 Leuchdiode Low gelb Reichelt* LED3,LED4 Leuchdiode Low rot Reichelt* LOWPOW,MOTPOW Wannenstecker 2 pol gewinkelt Reichelt* MOT1,MOT2 Wannenstecker 4 pol gewinkelt Reichelt* Q1 Quarz 16 Mhz Reichelt* R1,R2,R3,R4,R5,R6 Widerstand 1K Conrad* R7,R8,R9,R10 Drahtwiderstand 0,51 Ohm Reichelt* RESET,T1,T2 Minitaster liegend Reichelt* RN1 Netzwerkwiderstand 9x4,7k Reichelt* RN2 Netzwerkwiderstand 5x1k Reichelt* RN3 Netzwiderstand 4x10k Reichelt* RS232 Stiftleiste 3 polig Reichelt* Weiterhin notwendig: 1 Stück IC-Fassung/Sockel 16 polig Reichelt* 1 Stück IC-Fassung/Sockel 40 polig Reichelt* 5 Stück Befestigungsbolzen für Platine Reichelt* 1 Stück Leiterplatte über Leiterplattenhersteller anfertigen lassen (Eagle Datei siehe unten) öfters auch über Ebay erhältlich hier über Ebay* 7 Stück Jumper vergoldet Reichelt* 2 Stück Stecker für Betriebsspannungen Reichelt* 2 Stück Stecker für Motoren Reichelt* Alle Angaben ohne Gewähr
Downloads
Firmware für den ATMega32 Controller von RN-Schrittmotor (ZIP)
Eagle-Dateien zu RN-Schrittmotor (ZIP)
RN-Control steuert RN-Schrittmotor Beispielprogramme (ZIP)
Java Code für RN-Schrittmotor Ansteuerung (ZIP)
PC - Steuerprogramm als Beispiel (ZIP)
Leiterplatte zum Projekt bestellen
Neu! Die Leiterplatte für dieses Projekt ist direkt über den Shop PlatinenCenter erhältlich. Da die Platinen dort vorgefertigt werden, sind diese sehr preiswert lieferbar.
Individuelle Leiterplatten
Möchtest du keine vorgefertigte Leiterplatte, weil Du vielleicht vorher Änderungen an dem Layout vornehmen möchtest, dann empfehlen ich die Anbieter auf unserer Leiterplatten-Service Seite.
Das Leiterplattenangebot ist ein Service Angebot der jeweiligen Anbieter. Bei Fragen bezüglich Lieferung und Preis bitte dort nachfragen!

Im Bild sieht man die I2C Verbindung zwischen RN-Control und RN-Schrittmotor
Bascom Beispiel: RN-Control steuert RN-Schrittmotor
Diese Beispiel demonstriert die Schrittmotoransteuerung über RS232. Ein Beispiel für I2C wird aber oben auch zum Download bereitgestellt. Natürlich eignet sich auch jede andere Programmiersprache wie z.B. C oder Java für die Ansteuerung.
'###################################################
'Schrittmotoransteuerung mit RN-Control und
'Ansteuerungsboard RN-SCHRITTMOTOR über RS232
'rncontrol_schrittmotor_rs2321.bas
'
'Aufgabe:
' Dieses Testprogramm beschreibt die Motorboard RS232-Funktionen
' und legt einige der Befehle auf die 5 Tasten
' Den verschiedenen Tasten sind bestimmte Funktionen zugeordnet
' Taste 1: Motor endlos drehen (schaltet den Motor automatisch ein)
' Taste 2: Richtungswechsel
' Taste 3: Fragt der bereits ausgeführten Motorschritte
' des linken Motors vom Board ab und
' berechnet daraus Umdrehungen und Fahrtstrecke
' Daten werden über RS232 angezeigt
' Taste 4: Ändert die Geschwindigkeit des linken Motors
' mit jedem Tastendruck
' Taste 5: Schaltet den linken Motor wieder aus
'
'Autor: Frank
'Weitere Beispiele und Beschreibung der Hardware
'in der Anleitung zu RN-Schrittmotor
'Anleitung findet man unter https://www.mikrocontroller-elektronik.de/
'Weitere Beispiele sind dort gerne willkommen!
'##############################################################
$programmer = 12 'MCS USB (Zeile weglassen wenn anderer Programmer)
' -------------- RN-Control übliche _____________________
Declare Function Tastenabfrage() As Byte
$regfile = "m32def.dat"
$framesize = 64
$swstack = 64
$hwstack = 64
$crystal = 16000000 'Quarzfrequenz
$baud = 9600
Config Scl = Portc.0 'Ports fuer IIC-Bus
Config Sda = Portc.1
Config Adc = Single , Prescaler = Auto 'Für Tastenabfrage und Spannungsmessung
Config Pina.7 = Input 'Für Tastenabfrage
Porta.7 = 1 'Pullup Widerstand ein
Dim Taste As Byte
Dim Ton As Integer
I2cinit
Start Adc
Sound Portd.7 , 400 , 450 'BEEP
Sound Portd.7 , 400 , 250 'BEEP
Sound Portd.7 , 400 , 450 'BEEP
Print
Print "**** RN-CONTROL V1.4 *****"
Print "Demoprogramm um Zusatzboard RN-Schrittmotor zu testen/demonstrieren"
Print
' -------------- Ende RN-Control übliche _____________________
Declare Sub Sendebytearray()
'Befehle im Schrittmotorbetrieb
'Ein RN-Schrittmotor Befehl besteht immer aus 7 Bytes, auch wenn einige Befehle
'weniger Parameter benötigen. Wenn weniger Bytes erforderlich sind, werden die unnötigen
'Bytes mit beliebigen Wert gefüllt und ignoriert. .Die konstante Zahl erleichtert und
'beschleunigt die Interpretation und Verarbeitung!
'Befehlssyntax:
'Befehl, Motor , Par1, Par2, Par3, Par4, crc
Const Befehl_ausschalten = 51 'Motor ausschalten
Const Befehl_drehrichtung = 52 'Drehrichtung festlegen
Const Befehl_geschwindigkeit = 53 'Geschwindigkeit (wahlweise mit Rampe)
Const Befehl_endlosdrehung = 54 'Motoren endlos bis zu einem Stoppbefehl drehen
Const Befehl_schrittzahlabrufen = 102 'Aktuell bewegte Schrittzahl abrufen (Long Wert)
Const Befehl_versionstatus = 255 'Version & Copyright per RS232 ausgeben
Const Motor_1 = 1
Const Motor_2 = 2
Dim Rs232daten(7) As Byte 'Array um Befehlsfolge auszunehmen
Dim Lowbyte As Byte
Dim Highbyte As Byte
Dim Richtung As Bit
Dim Schritte As Long
Dim Temp As Byte
Dim Ltemp As Long
Dim Umdrehungen As Single
Dim Fahrstrecke As Word
Dim Geschwindigkeit As Byte
'------------------------------------------------------------
' Dieser Abschnitt ist nur notwendig wenn RN-KeyLCD als
' LCD Ausgabe genutzt werden soll
Const Rnkeylcd_slaveid_write = &H40 'I2C SlaveAdresse
Const Rnkeylcd_slaveid_read = &H41
Dim Empfang(5) As Byte
Dim Stemp As String * 100
I2cinit
'-------------------------------------------------------------
Richtung = 0
Geschwindigkeit = 250
Do
Taste = Tastenabfrage()
If Taste <> 0 Then
Select Case Taste
Case 1 'Motor endlos drehen
Rs232daten(1) = Befehl_endlosdrehung 'Befehlscode
Rs232daten(2) = Motor_1 '1 Parameter
Sendebytearray
Case 2 'Motor endlos drehen
Toggle Richtung
Rs232daten(1) = Befehl_drehrichtung 'Befehlscode
Rs232daten(2) = Motor_1 '1 Parameter
Rs232daten(3) = Richtung '2 Parameter
Sendebytearray
Case 3 'Geschwindigkeit ändern
If Geschwindigkeit > 40 Then
Geschwindigkeit = Geschwindigkeit - 20
Else
Geschwindigkeit = Geschwindigkeit - 1
End If
Rs232daten(1) = Befehl_geschwindigkeit 'Befehlscode
Rs232daten(2) = Motor_1 '1 Parameter
Rs232daten(3) = Geschwindigkeit '2 Parameter
Rs232daten(4) = 0 '3 Parameter (wie schnell Geschwindigkeit geändert werden soll)
Sendebytearray
Case 4 'Motor für Datenabruf anwählen
Do : Loop Until Inkey() = 0 'Diese Zeile leert Buffer
Rs232daten(1) = Befehl_schrittzahlabrufen 'Befehlscode
Rs232daten(2) = Motor_1 '1 Parameter
Sendebytearray
Inputbin Empfang(1) , 5
Schritte = Empfang(1)
Ltemp = Empfang(2) * 256
Schritte = Schritte + Ltemp
Ltemp = Empfang(3) * 65536
Schritte = Schritte + Ltemp
Ltemp = Empfang(4) * 16777216
Schritte = Schritte + Ltemp
'LCD Löschen (nur wenn Sie Board RN-KeyLCD einsetzen)
Stemp = Chr(12) : I2csend Rnkeylcd_slaveid_write , Stemp , 1
'Schritte auf LCD ausgeben
Stemp = Str(schritte) : I2csend Rnkeylcd_slaveid_write , Stemp , 10
Case 5 'Motor ausschalten
Rs232daten(1) = Befehl_ausschalten 'Befehlscode
Rs232daten(2) = Motor_1 '1 Parameter
Sendebytearray
End Select
Sound Portd.7 , 400 , 500 'BEEP
End If
Waitms 100
Loop
End
' Diese Unterfunktion fragt die Tastatur am analogen Port ab
' Sollte beim betätigen einer Taste kein Quittungston kommen, dann
' muss die die Tastenabfrage (Select Case Anweisung in Funktion )
' an ihr Board angepaßt werden. Widerstandstoleranzen sorgen in
' Einzelfällen manchmal dafür das die Werte etwas anders ausfallen
' Am besten dann den WS wert mit Print für jede Taste ausgeben lassen
Function Tastenabfrage() As Byte
Local Ws As Word
Tastenabfrage = 0
Ton = 600
Ws = Getadc(7)
' Print "ws= " ; Ws
If Ws < 1010 Then
Select Case Ws
Case 400 To 455
Tastenabfrage = 1
Ton = 550
Case 335 To 380
Tastenabfrage = 2
Ton = 500
Case 250 To 305
Tastenabfrage = 3
Ton = 450
Case 180 To 220
Tastenabfrage = 4
Ton = 400
Case 100 To 130
Tastenabfrage = 5
Ton = 350
End Select
Sound Portd.7 , 400 , Ton 'BEEP
End If
End Function
'Hilfsfunktion um Befehle zu senden
Sub Sendebytearray()
Local I As Byte
Print "!#";
For I = 1 To 7
Print Chr(rs232daten(i));
Next I
End Sub
Weblinks zum Thema
- Forum für Diskussionen
- Bascom
- Schrittmotor Grundlagen in RN-Wissen
- Alternatives Schrittmotor Projekt RN-Stepp297
Weitere Bezugsquellen
- für Schrittmotoren z.B. hier bei Ebay* oder Amazon*
- andere Schrittmotortreiber hier bei Ebay*
Hilfreiche Bücher zum Thema



Letzte Aktualisierung am 1.04.2025 / * Affiliate Links
Geeignete Lötstation bzw. Lötkolben


Letzte Aktualisierung am 1.04.2025 / * Affiliate Links
Weitere Hinweise
Vor dem Aufbau bitte nachfolgende Hinweise lesen:Das Projekt unterliegt einer CC-Lizenz - Lizenzhinweis (zum Aufklappen anklicken)
Falls Dir der Beitrag gefallen oder geholfen hat kannst Du dem Autor aber gerne durch eine kleine Spende Danke sagen!


Hi,
ich suche schon länger nach einem Schrittmotortreiber.
Ich benötige aber mehr Leistung, also möchte ich den größeren Bruder L6203 nutzten.
Ich frage mich nur welche Frequenzen für die Stromsteuerung genutzt werden.
Ein Mega32 kann bei geringerer Auflösung maximal 80kSPS ?!
Wenn ich eine Chopping-Freuquenz von min. 20kHz sind das nur vier Abtastungen. Reicht das ?
Oder arbeitet das Board mit einer geringeren Choppingfreuquenz ?
LG Phil
Dieses Board arbeitet mit einer Chopping-Frequenz von ca. 15 khz. Das reicht aber auch nur aus um Schrittzahlen bis bestenfalls 1000 Schritte pro Sekunde gut zu bewältigen. Bei höheren Schrittgeschwindigkeiten sollte auch Chopping-Frequenz höher sein, wie hoch genau müsste man erproben.
Hi,
gibt es diesen Schrittmotortreiber auch fertig zu bestellen oder nur als Bausatz.?
wenn ja bitte ich um einen Link. 🙂
danke,
lg
Nein fertig gibt es diesen nicht!
Hallo
Ich habe eine kurze Frage: Kann man mit dieser Platine bzw.Schaltung zwei bzw. drei Schrittmotoren
exakt zum gleichen Zeitpunkt starten,wobei die Motoren verschiedene Schrittgeschwindigkeiten
haben sollen ? Vielen Dank für eine Rückantwort.
mfg
Rainer
Nur 2 Schrittmotoren! Schau dir die Befehlsübersicht an, dann weißt Du genau was es kann.
Hallo,
wie sind die Lockbits/Fusebits des ATMEGA32 16PU zu setzen?
Grüsse, Willi
Per Fusebit muss nur vor allem der externe Quarz aktiviert werden. Die Lockbits kannst Du einstellen wie du willst.
Hallo guten Tag,
wie werden den diese avalanche Dioden BYV27-200 eingebaut,bzw. wo ist bei dieser Diode
die Kathode bzw. Anode.Gibt es ein Foto wie sie auf der Platine eingeaut sind?
Vielen Dank für eine Rückmeldung.
mfg
R.Stapp
Die Kathode hat im Schaltzeichen ein Strich, dieser Strick ist auch auf der Diode als Kathode markiert.
Hallo,
Mir ist aufgefallen, dass der Befehlscode 55 nicht in der Befehlsübersicht erscheint.
Ich betreibe den Treiber (ältere Version 1.7 damals noch als Bausatz-Kit gekauft – lag bei mir lange rum) erst seit kurzen, bin aber begeistert von dem Funktionsumfang und würde diesen Treiber einem A4988 oder TB6600 vorziehen. Aktuell verwende ich den I2C Bus zum ansteuern mit einem STM32 und es funktioniert wie in dem Tutorial beschrieben.
Es ist ein sehr schönes Projekt.
Vielen Dank & Viele Grüße,
Sebastian